 PDF(2882 KB)
PDF(2882 KB)

Image Dehazing Based on Priori Guidance of Depth of Field and Optimization of Ambient Light
MA Wen-gang, ZHANG Ya-dong, GUO Jin
ACTA ELECTRONICA SINICA ›› 2022, Vol. 50 ›› Issue (7) : 1708-1721.
PDF(2882 KB)
PDF(2882 KB)
Image Dehazing Based on Priori Guidance of Depth of Field and Optimization of Ambient Light
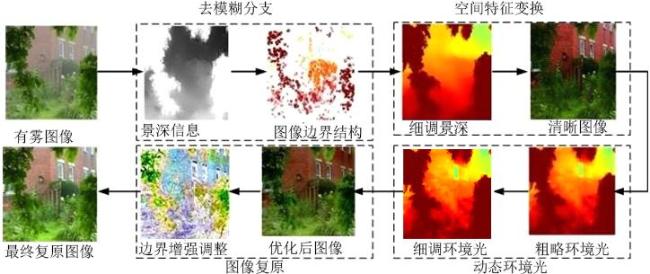
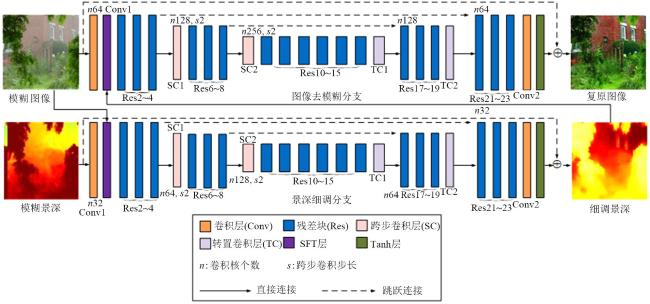
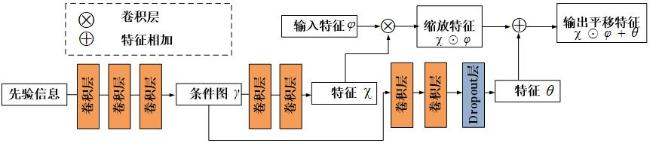
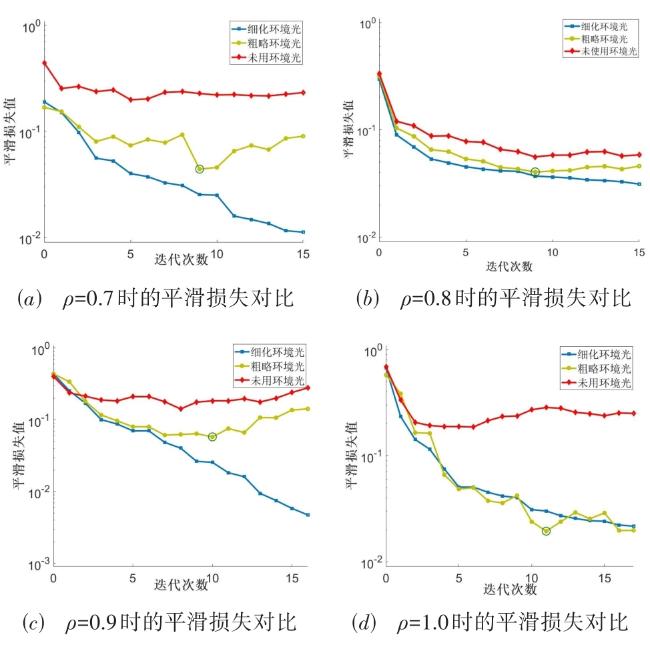
Under the dark channel prior, there are incomplete edge defogs and loss of detailed information. Therefore, an image depthing method based on a depth guided network(DGN) and optimization of ambient light is proposed. First, the foggy image was restored to the initial clear image by using the image deblurring branch and depth of field prior information in the DGN. Meanwhile, the depth of field information in the image was extracted. The depth-of-field fine-tuning network in DGN was used to restore the boundaries and structures in the depth-of-field map. Then, the spatial feature transform(SFT) layer was used to transform the image iteratively. The purpose of transforming the fine-tuned depth information into image features was achieved. Moreover, zooming, panning, and initial clear image features were merged. Depth of field guidance was used to optimize the original image. Finally, the dynamic ambient light was refined and used for image defogging. The detailed information of the image was further optimized. The purpose of the restored image with suitable color and higher contrast was achieved. Experiments show that the smoothness of the restored image obtained from the subjective comparison is better. The dynamic ambient light optimization can enhance the detailed information of the image. Images with better contrast can be obtained. The mean value of SSIM and PSNR obtained by synthesizing foggy images is 88.78% and 22.98 dB, respectively. The average value of the detail intensity and the color reproduction obtained from the real foggy image are 0.436 8 and 0.794, respectively. When compared with other defogging methods, it has the best performance index and the shortest time. Furthermore, its advantage lies in better real-time defogging. Moreover, it has good robustness.
depth guided network / image deblurring branch / depth refinement branch / spatial feature transform / dynamic ambient light / image dehazing {{custom_keyword}} /
表1 景深细调分支 |
| 不同网络层 | 输入大小 | 输出大小 | 核大小 | 步长 | 填充 | 求和 |
|---|---|---|---|---|---|---|
| Conv1 | 1 | 32 | 7 | 1 | 3 | — |
| SC1 | 32 | 64 | 3 | 2 | 1 | — |
| SC2 | 64 | 128 | 3 | 2 | 1 | — |
| Conv2 | 32 | 32 | 7 | 1 | 3 | — |
| SFT | 32 | 32 | — | — | — | — |
| Res2~4 | 32 | 32 | — | — | — | — |
| Res6~8 | 64 | 64 | — | — | — | — |
| Res10~15 | 128 | 128 | — | — | — | — |
| Res17~19 | 64 | 64 | — | — | — | — |
| Res21~23 | 32 | 32 | — | — | — | — |
| TC1 | 128 | 64 | 4 | 2 | 1 | Res8 |
| TC2 | 64 | 32 | 4 | 2 | 1 | Res4 |
| Tanh | 1 | 1 | — | — | — | Input |
表2 去模糊分支 |
| 不同网络层 | 输入大小 | 输出大小 | 核大小 | 步长 | 填充 | 求和 |
|---|---|---|---|---|---|---|
| Conv1 | 3 | 64 | 7 | 1 | 3 | — |
| SC1 | 64 | 128 | 3 | 2 | 1 | — |
| SC2 | 128 | 256 | 3 | 2 | 1 | — |
| Conv2 | 64 | 3 | 7 | 1 | 3 | — |
| SFT | 64 | 64 | — | — | — | — |
| Res2~4 | 64 | 64 | — | — | — | — |
| Res6~8 | 128 | 128 | — | — | — | — |
| Res10~15 | 256 | 256 | — | — | — | — |
| Res17~19 | 128 | 128 | — | — | — | — |
| Res21~23 | 64 | 64 | — | — | — | — |
| TC1 | 256 | 128 | 4 | 2 | 1 | Res8 |
| TC2 | 128 | 64 | 4 | 2 | 1 | Res4 |
| Tanh | 3 | 3 | — | — | — | Input |
表3 损失函数有效性分析 |
| 损失函数 | PSNR/dB(↑) | SSIM/%(↑) |
|---|---|---|
| 无 | 16.48 | 79.64 |
| 无 | 17.69 | 81.26 |
| 无 | 19.81 | 83.93 |
| 本文方法 | 24.69 | 86.67 |
表4 损失函数权重有效性分析 |
| 权重组合 | PSNR/dB(↑) | SSIM/%(↑) |
|---|---|---|
| | 22.17 | 82.17 |
| | 20.42 | 83.59 |
| | 21.38 | 81.78 |
| 本文权重组合 | 24.69 | 86.67 |

表5 合成有雾图像的PSNR指标对比/dB(↑) |
| Image | He方法 | Gibson方法 | Cai方法 | 文献[18]方法 | 文献[19]方法 | 本文方法 |
|---|---|---|---|---|---|---|
| 1 | 14.615 0 | 15.236 5 | 17.742 1 | 19.325 4 | 20.369 8 | 20.236 5 |
| 2 | 16.325 4 | 18.965 7 | 19.658 7 | 20.365 8 | 21.468 8 | 21.325 4 |
| 3 | 20.365 8 | 20.658 7 | 21.589 7 | 22.354 7 | 22.698 7 | 23.658 7 |
| 4 | 19.647 8 | 20.674 8 | 21.695 2 | 22.968 7 | 23.654 7 | 24.365 4 |
| 5 | 21.657 4 | 21.968 9 | 22.639 7 | 23.658 7 | 23.962 2 | 24.654 7 |
| 6 | 20.365 4 | 20.365 8 | 23.648 9 | 22.369 4 | 25.365 1 | 23.643 2 |
表6 合成有雾图像的SSIM值对比/%(↑) |

表7 真实有雾图像的实验结果数据分析 |
| Image | He方法 | Gibson方法 | Cai方法 | 文献[18]方法 | 文献[19]方法 | 本文方法 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| | | | | | | | | | | | | |
| 1 | 0.345 8 | 0.654 | 0.394 5 | 0.697 | 0.412 2 | 0.712 | 0.446 5 | 0.728 | 0.465 8 | 0.719 | 0.485 2 | 0.743 |
| 2 | 0.258 7 | 0.528 | 0.276 8 | 0.612 | 0.303 4 | 0.687 | 0.345 1 | 0.712 | 0.377 4 | 0.725 | 0.401 4 | 0.765 |
| 3 | 0.324 4 | 0.621 | 0.362 7 | 0.643 | 0.389 7 | 0.674 | 0.404 2 | 0.741 | 0.412 5 | 0.758 | 0.402 6 | 0.821 |
| 4 | 0.298 7 | 0.517 | 0.312 4 | 0.589 | 0.336 8 | 0.632 | 0.365 2 | 0.697 | 0.386 7 | 0.732 | 0.366 7 | 0.758 |
| 5 | 0.369 4 | 0.674 | 0.387 4 | 0.748 | 0.413 8 | 0.789 | 0.452 7 | 0.823 | 0.469 6 | 0.831 | 0.484 2 | 0.802 |
| 6 | 0.325 7 | 0.687 | 0.354 7 | 0.695 | 0.396 5 | 0.687 | 0.412 4 | 0.756 | 0.395 2 | 0.824 | 0.451 2 | 0.832 |
| 7 | 0.369 2 | 0.564 | 0.298 5 | 0.624 | 0.412 9 | 0.724 | 0.396 5 | 0.742 | 0.432 5 | 0.782 | 0.479 8 | 0.806 |
| 8 | 0.298 2 | 0.632 | 0.362 4 | 0.728 | 0.406 2 | 0.756 | 0.423 4 | 0.825 | 0.412 6 | 0.734 | 0.428 2 | 0.834 |
| 9 | 0.325 4 | 0.654 | 0.354 7 | 0.784 | 0.417 8 | 0.792 | 0.395 2 | 0.754 | 0.425 7 | 0.766 | 0.432 4 | 0.786 |
表8 各方法去雾的时间对比/s |
| Image | He方法 | Gibson方法 | Cai方法 | 文献[18]方法 | 文献[19]方法 | 本文方法 |
|---|---|---|---|---|---|---|
| 合成景物1 | 2.826 574 | 1.635 221 | 0.922 695 | 0.963 325 | 0.862 691 | 0.595 200 |
| 合成景物2 | 2.652 600 | 1.323 500 | 0.968 500 | 0.965 200 | 0.793 600 | 0.523 452 |
| 真实景物1 | 3.102 300 | 2.213 600 | 1.369 800 | 1.039 600 | 0.963 500 | 0.662 300 |
| 真实景物2 | 2.963 258 | 2.326 927 | 1.132 596 | 1.236 982 | 0.954 921 | 0.754 150 |
| 1 |
嵇晓强, 戴明, 尹传历, 等. 航拍降质图像的去雾处理[J]. 光学精密工程, 2011, 19(7): 1659-1668.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
李佳童, 章毓晋. 图像去雾算法的改进和主客观性能评价[J]. 光学精密工程, 2017, 25(3): 735-741.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
刘冬梅, 常发亮. 基于非下采样轮廓小波变换增强的从粗到精的显著性检测[J]. 光学学报, 2019, 39(1): 0115003.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
陈永, 郭红光, 艾亚鹏. 基于双域分解的多尺度深度学习单幅图像去雾[J]. 光学学报, 2020, 40(2): 0210003.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
刘海波, 杨杰, 吴正平, 等. 基于暗通道先验和Retinex理论的快速单幅图像去雾方法[J]. 自动化学报, 2015, 41(7): 1264-1273.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
陈书贞, 任占广, 练秋生. 基于改进暗通道和导向滤波的单幅图像去雾算法[J]. 自动化学报, 2016, 42(3): 455-465.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
张小刚, 唐美玲, 陈华, 等. 一种结合双区域滤波和图像融合的单幅图像去雾算法[J]. 自动化学报, 2014, 40(8): 1733-1739.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
何林远, 毕笃彦, 熊磊, 等. 基于亮度反馈的彩色雾霾图像增强算法[J]. 电子学报, 2015, 43(10): 1978-1983.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
孙伟, 李大健, 刘宏娟, 等. 基于大气散射模型的单幅图像快速去雾[J]. 光学精密工程, 2013, 21(4): 1040-1046.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
王柯俨, 王迪, 赵熹, 等. 基于卷积神经网络的联合估计图像去雾算法[J]. 吉林大学学报(工学版), 2020, 50(5): 1771-1777.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
肖进胜, 周景龙, 雷俊锋, 等. 基于霾层学习的单幅图像去雾算法[J]. 电子学报, 2019, 47(10): 2142-2148.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
陈清江, 张雪. 基于并联卷积神经网络的图像去雾[J]. 自动化学报, 2021, 47(7): 1739-1748.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 22 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 23 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 24 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 25 |
李大鹏, 禹晶, 肖创柏. 图像去雾的无参考客观质量评测方法[J]. 中国图象图形学报, 2011, 16(9): 1753-1757.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(2882 KB)
PDF(2882 KB)
 图1 本文方法去雾流程图2 景深引导的DGN结构图
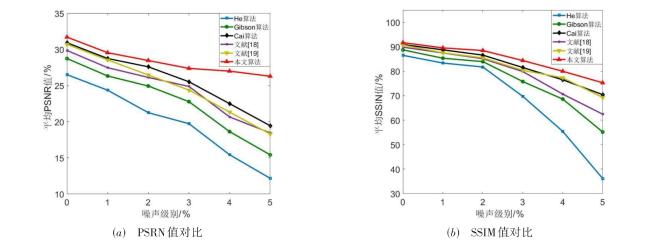
图1 本文方法去雾流程图2 景深引导的DGN结构图 表1 景深细调分支表2 去模糊分支图3 空间特征变换(SFT)结构图表3 损失函数有效性分析表4 损失函数权重有效性分析图4 不同ρ值的图像处理效果对比图5 不同增益系数下的去雾效果对比图6 不同分割值的平滑损失值对比图7 环境光优化效果对比图8 有雾图像图9 本文方法去雾效果图10 去雾过程效果对比图图11 合成景物1(去雾效果对比)图12 合成景物2(远处建筑景物)表5 合成有雾图像的PSNR指标对比/dB(↑)表6 合成有雾图像的SSIM值对比/%(↑)图13 真实景物1(近景景物)图14 真实景物2(远景景物)表7 真实有雾图像的实验结果数据分析图15 不同噪声等级下的复原能力对比表8 各方法去雾的时间对比/s
表1 景深细调分支表2 去模糊分支图3 空间特征变换(SFT)结构图表3 损失函数有效性分析表4 损失函数权重有效性分析图4 不同ρ值的图像处理效果对比图5 不同增益系数下的去雾效果对比图6 不同分割值的平滑损失值对比图7 环境光优化效果对比图8 有雾图像图9 本文方法去雾效果图10 去雾过程效果对比图图11 合成景物1(去雾效果对比)图12 合成景物2(远处建筑景物)表5 合成有雾图像的PSNR指标对比/dB(↑)表6 合成有雾图像的SSIM值对比/%(↑)图13 真实景物1(近景景物)图14 真实景物2(远景景物)表7 真实有雾图像的实验结果数据分析图15 不同噪声等级下的复原能力对比表8 各方法去雾的时间对比/s
/
| 〈 |
|
〉 |













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}