 PDF(2603 KB)
PDF(2603 KB)

Detection of Driving State Under Different Curve Road based on Entropy and Functional Connectivity of EEG
CHANG Wen-wen, YAN Guang-hui, YANG Zhi-fei, ZHANG Bing-tao, LUO Hao
ACTA ELECTRONICA SINICA ›› 2023, Vol. 51 ›› Issue (10) : 2874-2883.
PDF(2603 KB)
PDF(2603 KB)
Detection of Driving State Under Different Curve Road based on Entropy and Functional Connectivity of EEG
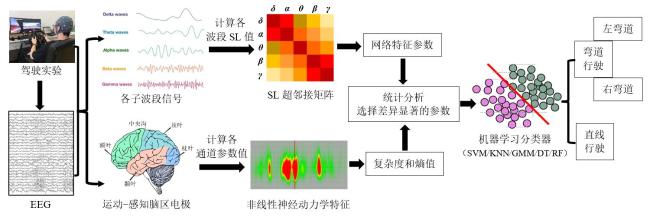
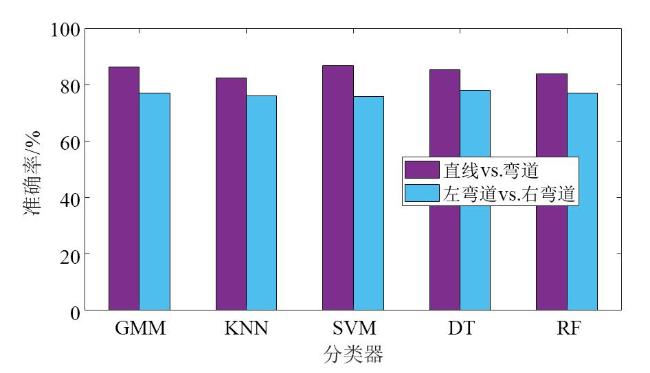
The decoding of different driving processes and driving intention prediction based on electroencephalogram (EEG) signals are the key issue of human computer interface based intelligent driving control. In order to realize the identification of driving process in straight road, left curve and right curve road, this paper proposes a feature extraction method for driving behaviors based on functional brain network and entropy features of EEGs, and achieve thes classification of different driving conditions under various curve by combining with several classifiers with the extracted EEG features. Corresponding simulation driving experiments are designed and the results show that the method proposed in this study can effectively identiy the driving process under various curve. All the classification accuracy for the 16 subjects between straight and curve road are higher than 82%, with the highest value to 86.66%, while the accuracy between left curve and right curve are higher than 75%, with the highest value to 77.95%. Interdependence analysis between different brain regions shows that there are obvious brain contralateral characteristics during curve driving. In addition, left curve driving needs more interactions between the brain regions than right curve driving, while the left hemisphere is slightly more active than the right hemisphere during straight driving. The result has significant value for understanding driver's brain cognitive characteristics in the process of curve driving and driving behavior detection under different curve road.
driving behavior / curve driving / electroencephalogram (EEG) / functional brain network / entropy {{custom_keyword}} /
表1 感觉运动脑区各熵值大小 |
| 熵/通道 | FC5 | FC1 | FC2 | FC6 | C3 | Cz | C4 | CP5 | CP1 | CP2 | CP6 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ApEn值 | 左弯道 | 0.420 3 | 0.467 8 | 0.461 5 | 0.433 6 | 0.462 1 | 0.467 6 | 0.450 3 | 0.468 6 | 0.464 6 | 0.455 6 | 0.401 2 |
| 右弯道 | 0.423 6 | 0.470 2 | 0.474 6 | 0.424 4 | 0.472 7 | 0.475 7 | 0.450 5 | 0.463 8 | 0.475 8 | 0.464 8 | 0.420 1 | |
| WaEn值 | 左弯道 | 0.535 9 | 0.459 3 | 0.445 6 | 0.563 8 | 0.426 5* | 0.398 8 | 0.458 9* | 0.499 3 | 0.408 8 | 0.427 4 | 0.554 6 |
| 右弯道 | 0.558 5 | 0.486 4 | 0.476 3 | 0.597 8 | 0.500 1* | 0.410 8 | 0.536 3* | 0.534 0 | 0.429 1 | 0.466 4 | 0.586 6 | |
| CoEn值 | 左弯道 | 0.582 0 | 0.547 4 | 0.547 7 | 0.599 8 | 0.543 2* | 0.548 7 | 0.551 2* | 0.585 0 | 0.539 1 | 0.557 0 | 0.626 4 |
| 右弯道 | 0.602 4 | 0.574 8 | 0.573 8 | 0.627 3 | 0.586 7* | 0.546 1 | 0.598 7* | 0.600 3 | 0.547 0 | 0.561 2 | 0.621 4 | |
| FuEn值 | 左弯道 | 0.212 5 | 0.174 1* | 0.182 1 | 0.218 5* | 0.176 0* | 0.167 7 | 0.188 0* | 0.196 3 | 0.167 7 | 0.169 2 | 0.221 7 |
| 右弯道 | 0.226 5 | 0.198 8* | 0.196 5 | 0.241 8* | 0.202 4* | 0.172 3 | 0.215 4* | 0.208 5 | 0.173 5 | 0.187 4 | 0.235 0 | |
| SaEn值 | 左弯道 | 0.708 4 | 0.643 1* | 0.659 5 | 0.735 4* | 0.648 6* | 0.637 2 | 0.670 3* | 0.698 5 | 0.630 2 | 0.625 9 | 0.737 9 |
| 右弯道 | 0.704 8 | 0.695 4* | 0.694 5 | 0.782 3* | 0.704 4* | 0.647 6 | 0.731 7* | 0.726 1 | 0.641 0 | 0.670 3 | 0.767 7 | |
| Hjorth参数 | 左弯道 | 0.322 2 | 0.270 6 | 0.268 4 | 0.340 2 | 0.277 5 | 0.256 8 | 0.280 3* | 0.292 0 | 0.253 7 | 0.253 4 | 0.342 9 |
| 右弯道 | 0.340 0 | 0.284 8 | 0.281 8 | 0.355 1 | 0.292 3 | 0.225 0 | 0.313 2* | 0.307 5 | 0.252 8 | 0.270 8 | 0.350 9 | |
| Hurst指数 | 左弯道 | 0.336 6 | 0.399 0 | 0.396 9 | 0.326 6 | 0.377 3 | 0.385 2 | 0.376 0 | 0.365 6 | 0.395 8 | 0.403 0 | 0.287 0* |
| 右弯道 | 0.332 6 | 0.401 4 | 0.400 2 | 0.325 6 | 0.383 2 | 0.401 1 | 0.364 2 | 0.367 7 | 0.407 3 | 0.396 1 | 0.316 8* | |
| * p <0.01,在左弯道和右弯道驾驶过程中感觉运动脑区熵值特征存在显著差异的通道和对应的熵值. |
| 1 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
关伟,杨柳,江世雄,等.脑电在交通驾驶行为中的应用研究综述[J].交通运输系统工程与信息, 2016, 3(16): 35-43.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
OKA N,
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
李莉, 陈静静, 郑旭媛. 基于同步似然分析的阿尔茨海默症静息态脑电功能网络连接特性的研究[J]. 生物医学工程学杂志, 2015, 32(5): 952-957.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 22 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 23 |
高军峰, 司慧芳, 余彬. 基于脑电样本熵的测谎分析[J].电子学报, 2017, 45(8): 1836-1841.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 24 |
席旭刚, 左静, 罗志增. 肌电模糊熵特征的加权核 FDA跌倒识别[J]. 电子学报, 2016, 44(6): 1376-1382.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(2603 KB)
PDF(2603 KB)
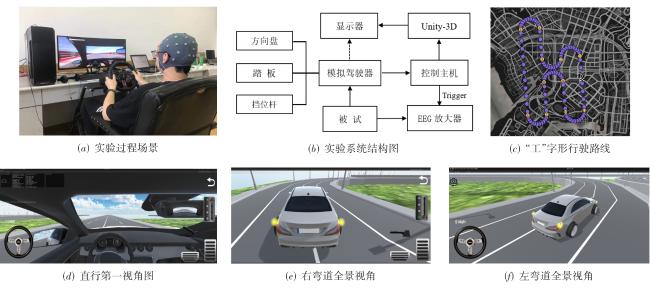
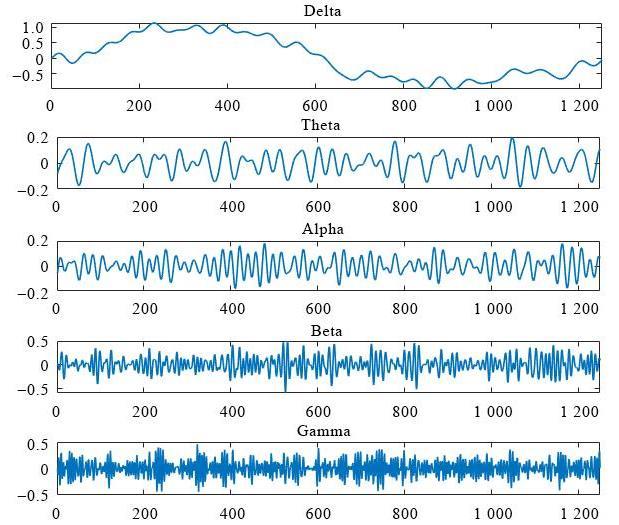
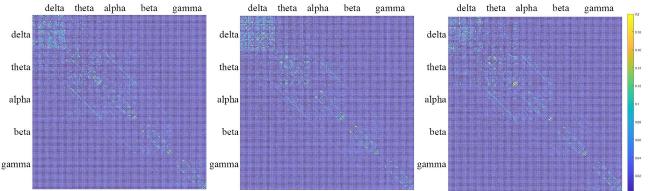
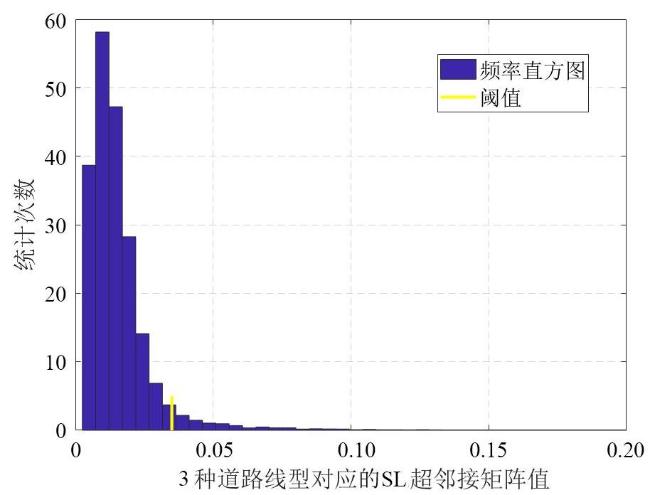
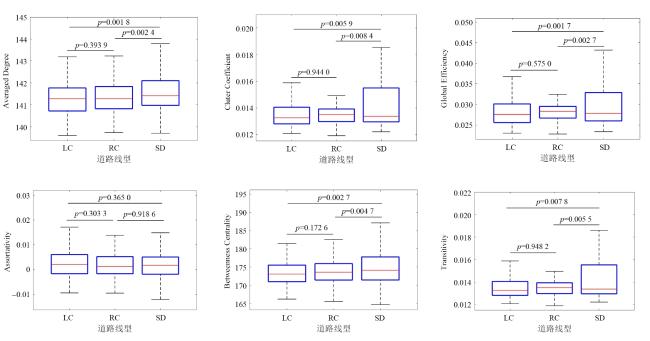
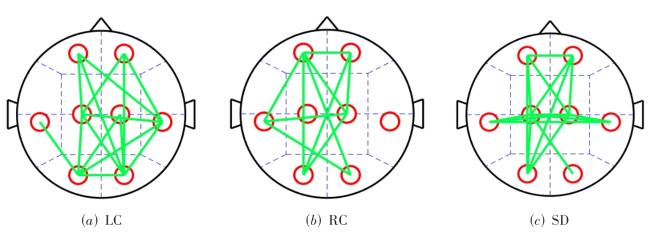
 图1 不同线型道路驾驶行为识别技术路线图图2 模拟驾驶实验平台以及3种驾驶场景图3 EEG信号5个子波段示意图图4 3种线型(LC, RC, SD)对应的EEG信号同步似然超邻接矩阵图5 三种线型对应SL超邻接矩阵值统计分布图 6 SL超邻接矩阵网络特征参数图 7 不同分类器分类准确率
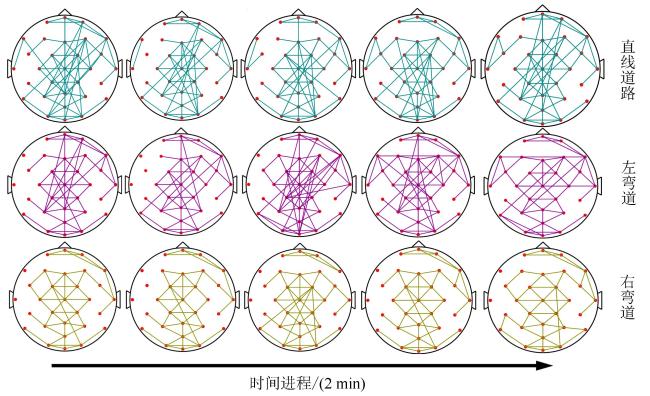
图1 不同线型道路驾驶行为识别技术路线图图2 模拟驾驶实验平台以及3种驾驶场景图3 EEG信号5个子波段示意图图4 3种线型(LC, RC, SD)对应的EEG信号同步似然超邻接矩阵图5 三种线型对应SL超邻接矩阵值统计分布图 6 SL超邻接矩阵网络特征参数图 7 不同分类器分类准确率 表1 感觉运动脑区各熵值大小图8 大脑基本脑区划分示意图图9 各脑区之间同步似然连接关系图10 不同驾驶道路下功能性脑网络拓扑结构随时间进程的变化过程
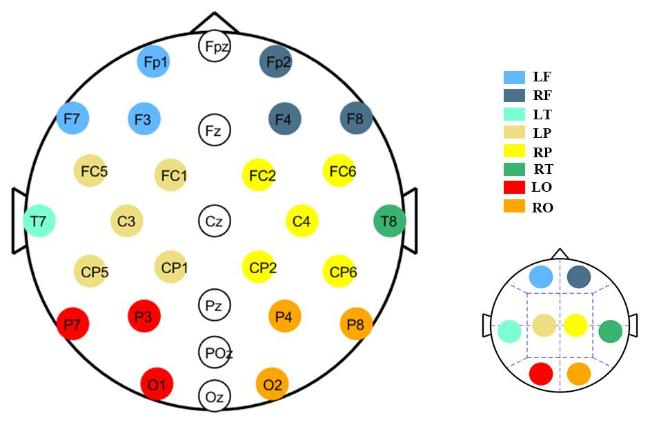
表1 感觉运动脑区各熵值大小图8 大脑基本脑区划分示意图图9 各脑区之间同步似然连接关系图10 不同驾驶道路下功能性脑网络拓扑结构随时间进程的变化过程
/
| 〈 |
|
〉 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}