 PDF(1692 KB)
PDF(1692 KB)

Track Privacy Protection Scheme Based on Adaptive Continuous Time in Crowdsensing
JIANG Wei-jin, WANG Hai-juan, ZHOU Wei, CHEN Yi-lin, WU Yu-ting, HAN Yu-qing
ACTA ELECTRONICA SINICA ›› 2023, Vol. 51 ›› Issue (10) : 2894-2901.
PDF(1692 KB)
PDF(1692 KB)
Track Privacy Protection Scheme Based on Adaptive Continuous Time in Crowdsensing
In response to the problems of poor prediction accuracy and low utility of privacy budget allocation in trajectory differential privacy protection, our paper proposes an adaptive trajectory prediction scheme for continuous time series in crowdsensing. Firstly, in the task assignment phase, trajectory routes are assigned to participants. Then, the HMM (Hidden Markov Model) is introduced to predict the trajectories. Next, a comprehensive privacy budget allocation method combining pre-allocation and adaptive allocation is used to reduce the privacy budget. Finally, the laplace mechanism is applied to perturb the locations. Experimental results show that compared with related work, the proposed method achieves a balance between prediction accuracy and low budget requirements, and provides good privacy protection for participants in trajectory privacy security in crowdsensing.
trajectory prediction / differential privacy / comprehensive privacy budget allocation / adaptive continuous time / crowdsensing {{custom_keyword}} /
| |
|---|
| 输入:轨迹数据集,待预测轨迹 输出:预测结果 1 计算 2 3 n=0 4 WHILE 5 计算 6 重新计算 7 n=n+1 8 END WHILE 9 10 初始化 11 FOR 12 计算 13 END FOR 14 15 FOR 16 17 END FOR 18 19 20 21 RETURN |
| |
|---|
| 输入:总隐私预算,实时轨迹数据集,预分配隐私数量 输出: 1 2 IF 3 计算 4 END 5 IF 6 7 执行预分配策略获取下一时刻时间戳 8 9 ELSE 10 计算扰动误差 //执行自适应分配 11 12 13 IF 扰动误差 14 为当前时间戳的每个采样点分配隐私预算 15 ELSE 16 直接释放 17 END 18 19 END |
表2 不同滑动窗口数量下 |
| 方案 | | | | ||||||
|---|---|---|---|---|---|---|---|---|---|
| | | | | | | | | | |
| PL[15] | 0.112 | 0.12 | 0.13 | 0.11 | 0.12 | 0.15 | 0.08 | 0.12 | 0.19 |
| PM[16] | 0.15 | 0.17 | 0.24 | 0.13 | 0.17 | 0.24 | 0.13 | 0.17 | 0.29 |
| TPA[17] | 0.25 | 0.27 | 0.36 | 0.2 | 0.27 | 0.36 | 0.2 | 0.27 | 0.36 |
| GEM[18] | 0.22 | 0.24 | 0.42 | 0.21 | 0.24 | 0.50 | 0.21 | 0.29 | 0.42 |
| PTPP[19] | 0.28 | 0.32 | 0.48 | 0.24 | 0.32 | 0.48 | 0.24 | 0.42 | 0.48 |
| Ours | 0.39 | 0.43 | 0.59 | 0.35 | 0.43 | 0.59 | 0.35 | 0.46 | 0.59 |
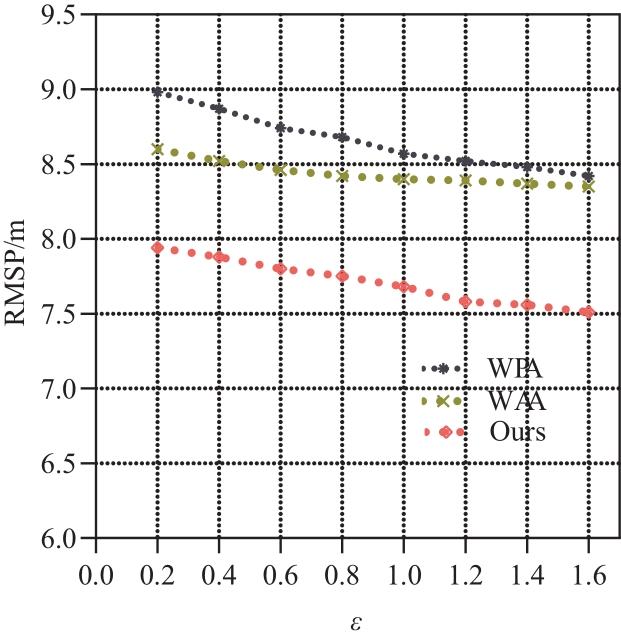
表3 不同方案下 |
| 方案 | | | | | |
|---|---|---|---|---|---|
| WPA | 12.12 | 9.28 | 9.25 | 8.12 | 7.54 |
| WAA | 10.97 | 9.53 | 8.99 | 8.82 | 8.72 |
| Ours | 10.21 | 8.25 | 8.12 | 7.96 | 7.50 |
| 1 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
童咏昕, 袁野, 成雨蓉, 等. 时空众包数据管理技术研究综述[J]. 软件学报, 2017, 28(1): 35-58.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(1692 KB)
PDF(1692 KB)
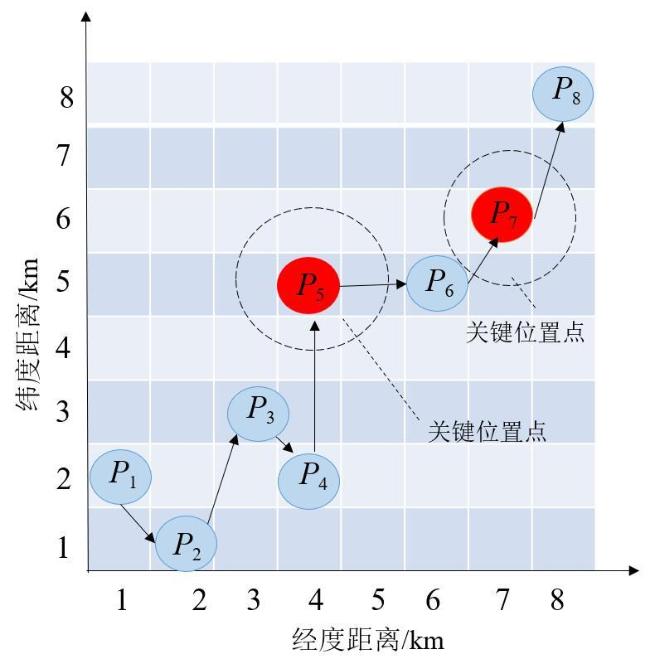
 图1 基于群智感知的智慧交通轨迹场景示意图图2 位置数据弹道模型
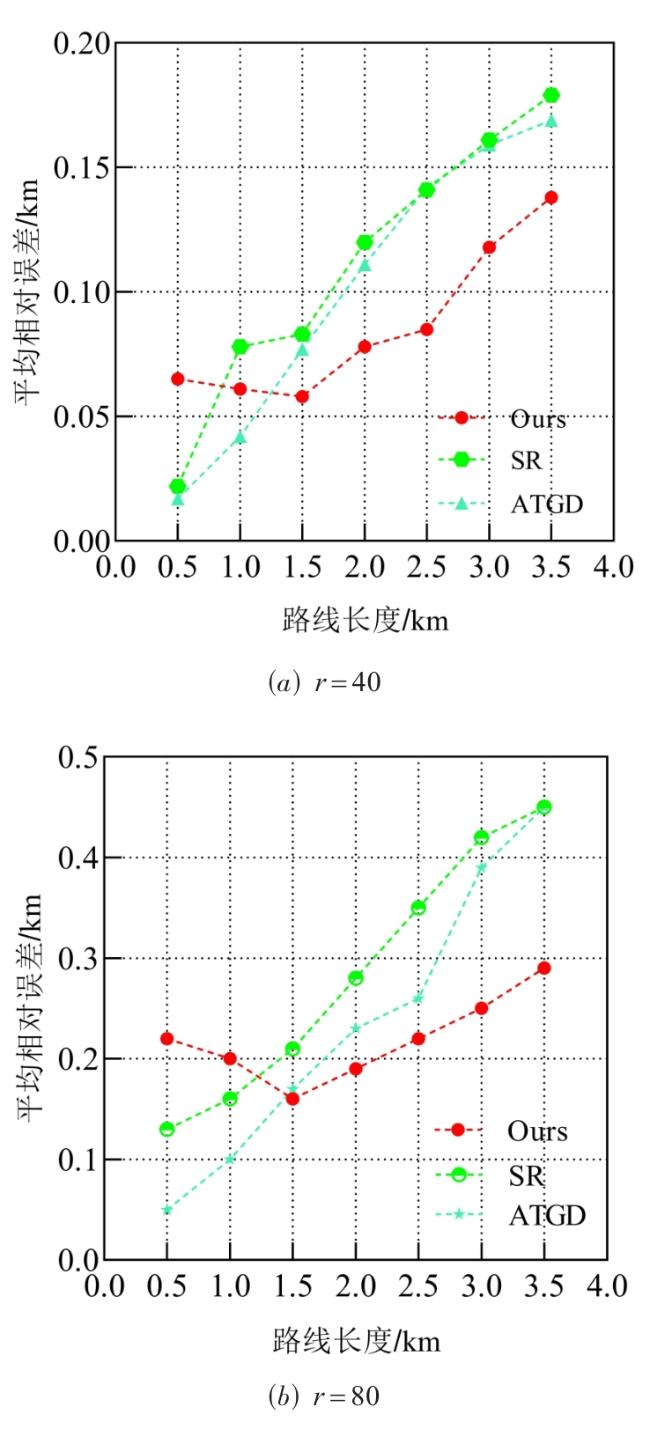
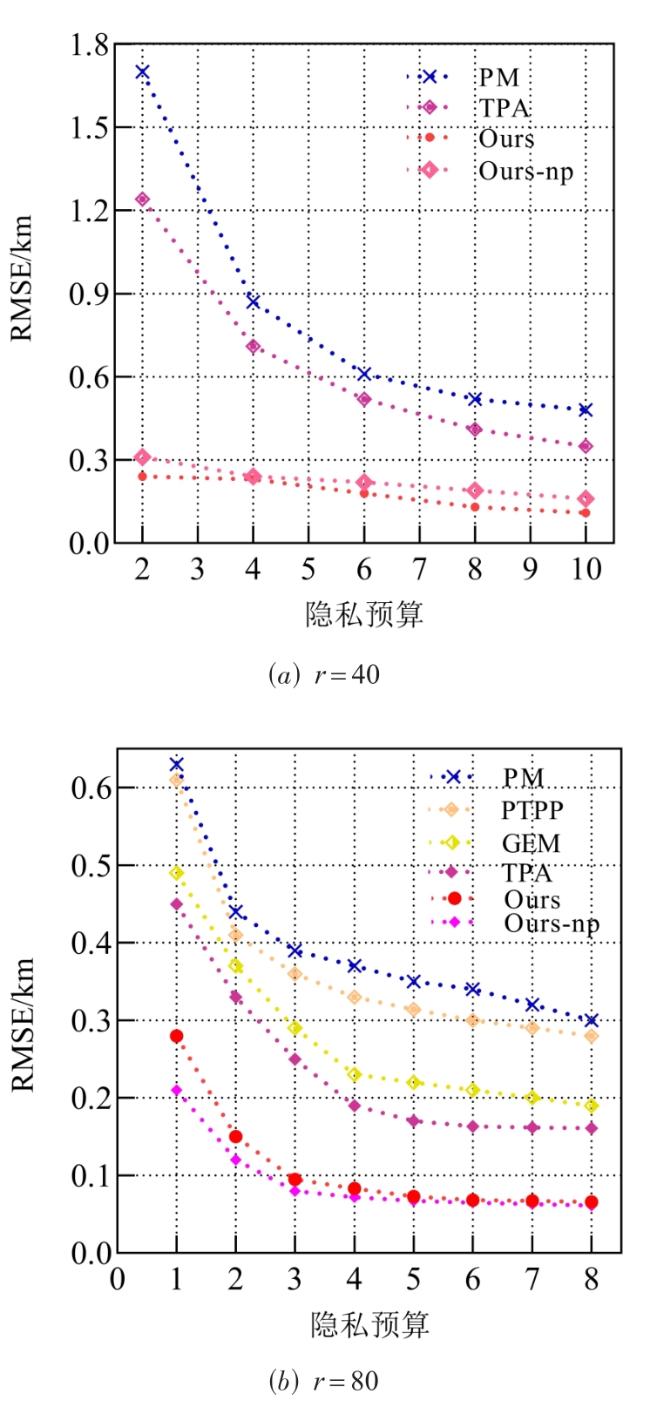
图1 基于群智感知的智慧交通轨迹场景示意图图2 位置数据弹道模型 图3 不同半径下路径长度对隐私效率的影响表2 不同滑动窗口数量下 C D F比较表3 不同方案下 M A E对比 (m)图4 隐私预算变化下隐私强度对比图5 不同隐私预算下轨迹模糊质量对比
图3 不同半径下路径长度对隐私效率的影响表2 不同滑动窗口数量下 C D F比较表3 不同方案下 M A E对比 (m)图4 隐私预算变化下隐私强度对比图5 不同隐私预算下轨迹模糊质量对比
/
| 〈 |
|
〉 |






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}