 PDF(6319 KB)
PDF(6319 KB)

AUV Global Path Panning Based on Improved T-Distribution Fireworks-Particle Swarm Optimization Algorithm
LIU Zhi-hua, ZHANG Ran, HAO Meng-nan, AN Kai-chen, CHEN Jia-xing
ACTA ELECTRONICA SINICA ›› 2024, Vol. 52 ›› Issue (9) : 3123-3134.
PDF(6319 KB)
PDF(6319 KB)
AUV Global Path Panning Based on Improved T-Distribution Fireworks-Particle Swarm Optimization Algorithm
In response to the long optimization time and high energy consumption faced by traditional particle swarm optimization algorithm in global path planning for autonomous underwater vehicle, this paper proposes an improved T-distribution fireworks-particle swarm optimization algorithm (TFWA-PSO), this algorithm integrates the efficient global search capability of the fireworks algorithm with the rapid local optimization characteristics of the particle swarm optimization algorithm. In the mutation stage, an adaptive T-distribution mutation is proposed to expand the search range, and it is theoretically demonstrated that this explosive mutation approach enables individuals to enhance their search ability near the local optimal solution. In the selection stage, a fitness selection strategy is proposed to eliminate individuals with poor fitness, solving the problem of the traditional fireworks algorithm's tendency to lose excellent individuals, and comparing the convergence speed between the improved T-distribution fireworks algorithm and the traditional fireworks algorithm. The improved algorithm's explosion, mutation operations, and selection strategy are integrated into the particle swarm algorithm. The velocity update formula of the particle swarm algorithm is improved, while the convergence proof of the improved algorithm is proved theoretically. The simulation results indicate that the TFWA-PSO can effectively plan the shortest path. Compared to the given intelligent optimization algorithms, TFWA-PSO on average reduces the time to find the optimal path by 24.72%, lowers energy consumption by 17.33%, and decreases the average path length by 16.96%.
autonomous underwater vehicle / global path planning / fireworks algorithm / particle swarm optimization / adaptive T-distribution mutation / convergence proof {{custom_keyword}} /
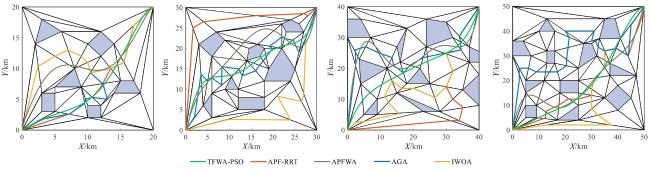
表1 低覆盖率环境下5种算法仿真数据对比 |
| 环境 | 指标 | TFWA-PSO | APF-RRT | APFWA | AGA | IWOA |
|---|---|---|---|---|---|---|
| 环境1 | 路径长度/km | 37.312 | 41.645 | 40.153 | 50.12 | 48.471 |
| 搜索时间/s | 11.880 7 | 17.12 | 12.144 6 | 14.210 2 | 21.131 | |
| 平均能耗/kJ | 159.942 | 175.825 | 182.974 | 195.73 | 201.1 | |
| 环境2 | 路径长度/km | 49.282 | 57.272 | 59.200 | 71.381 | 68.037 |
| 搜索时间/s | 13.920 3 | 16.379 | 16.083 1 | 20.35 | 22.314 3 | |
| 平均能耗/kJ | 167.817 | 189.716 | 192.321 | 197.241 | 190.35 | |
| 环境3 | 路径长度/km | 67.729 | 73.219 | 76.022 | 89.261 | 91.489 |
| 搜索时间/s | 16.902 1 | 22.701 | 18.921 2 | 23.101 | 25.147 | |
| 平均能耗/kJ | 246.368 | 278.891 | 280.281 | 299.435 | 307.397 | |
| 环境4 | 路径长度/km | 73.565 | 74.975 | 78.21 | 93.33 | 90.32 |
| 搜索时间/s | 20.504 | 26.533 | 23.246 | 27.304 7 | 26.489 6 | |
| 平均能耗/kJ | 291.069 | 296.551 | 310.034 | 350.093 | 348.321 |
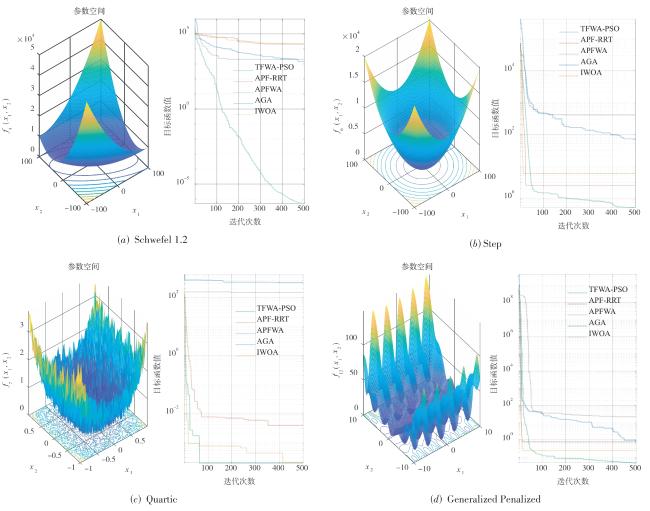
表2 测试算法在基准测试函数上的实验结果 |
| 函数 | 指标 | TFWA-PSO | APF-RRT | APFWA | AGA | IWOA |
|---|---|---|---|---|---|---|
| | 平均值 | | | | | |
| 标准差 | | | | | | |
| | 平均值 | | | | | |
| 标准差 | | | | | | |
| | 平均值 | | | | | |
| 标准差 | | | | | | |
| | 平均值 | | | 65.843 | | |
| 标准差 | | | 32.564 | | | |
| | 平均值 | | 78.591 | | | |
| 标准差 | 43.252 | 19.137 | | | 92.772 | |
| | 平均值 | | | | | 80.883 |
| 标准差 | | | | | | |
| | 平均值 | | | | | |
| 标准差 | | | | | | |
| | 平均值 | | | | | |
| 标准差 | | | | | | |
| | 平均值 | | | | | |
| 标准差 | | | | | | |
| | 平均值 | | | | | |
| 标准差 | | | | | | |
| | 平均值 | | | 11.214 | | |
| 标准差 | | | | | | |
| | 平均值 | | | | | |
| 标准差 | | | | | |
| 1 |
陈嘉兴, 程杰, 董云玲, 等. 基于弯曲声线和测距修正的水下节点定位算法[J]. 电子学报, 2022, 50(7):1567-1572.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
郝诗雅, 杨媛媛, 董怡靖, 等.水声传感器网络中粒子群与蒙特卡罗优化的移动定位算法[J]. 电子学报, 2021, 49(2):292-299.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
张瀚彬, 史先鹏, 刘喜梅. 基于改进量子粒子群算法的AUV路径规划研究[J]. 海洋工程, 2023, 41(2): 86-92.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
胡致远, 王征, 杨洋, 等. 基于人工鱼群-蚁群算法的UUV三维全局路径规划[J]. 兵工学报, 2022, 43(7): 1676-1684.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
胡章芳, 冯淳一, 罗元. 改进粒子群优化算法的移动机器人路径规划[J]. 计算机应用研究, 2021, 38(10): 3089-3092.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
朱佳莹, 高茂庭. 融合粒子群与改进蚁群算法的AUV路径规划算法[J]. 计算机工程与应用, 2021, 57(6): 267-273.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
陈秋莲, 郑以君, 蒋环宇, 等. 基于神经网络改进粒子群算法的动态路径规划[J]. 华中科技大学学报(自然科学版), 2021, 49(2): 51-55.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
郗安民, 王琦, 孙学彬. 一种有效的地图创建方法和机器人的路径规划[J]. 机械设计, 2010, 27(1): 35-38.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
魏振春, 傅宇,马仲军,等.带时间窗的无线可充电传感器网络多目标路径规划算法[J]. 电子学报, 2022, 50(8): 1819-1829.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
黄湘松, 于日龙, 潘大鹏. 面向目标定位精度的主从式无人机编队航迹规划方法[J]. 电子学报, 2023, 51(9): 2289-2300.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
张玮, 马焱, 赵捍东, 等. 基于改进烟花-蚁群混合算法的智能移动体避障路径规[J]. 控制与决策, 2019, 34(2): 335-343.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
李广强, 董文超, 朱大庆, 等. 基于改进鲸鱼优化算法的AUV三维路径规划[J]. 系统工程与电子技术, 2023, 45(7): 2170-2182.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(6319 KB)
PDF(6319 KB)
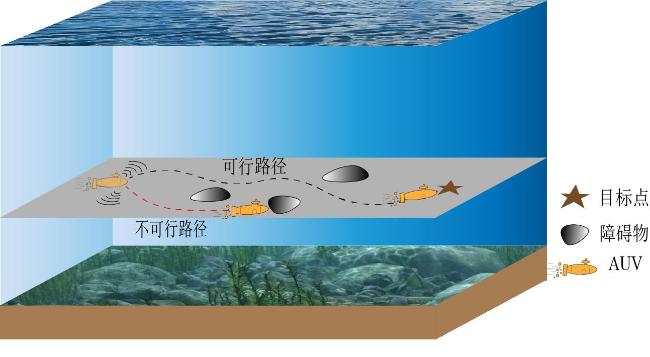
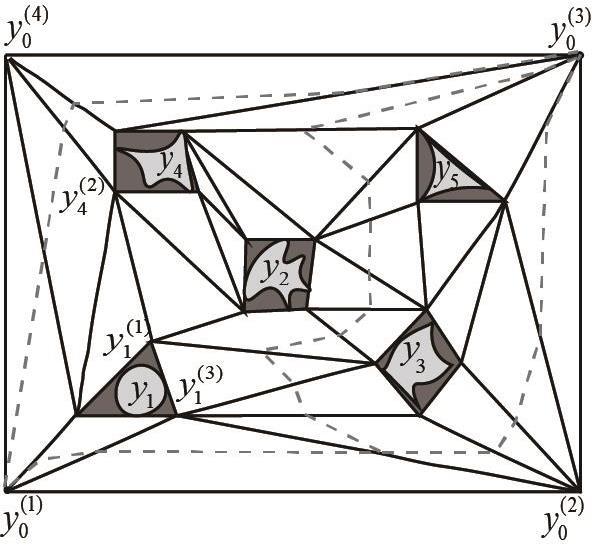
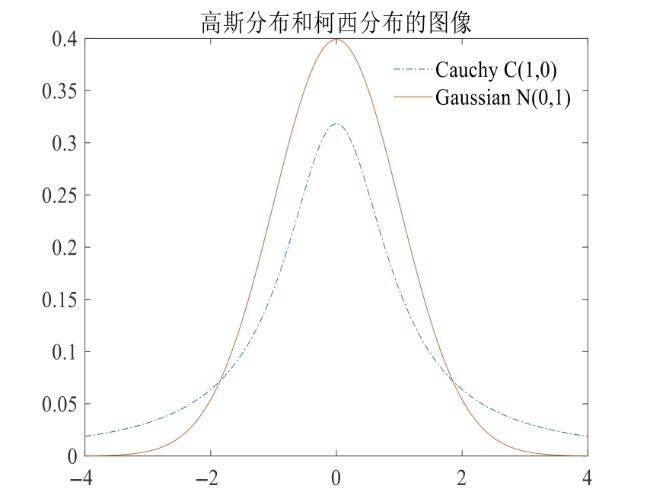
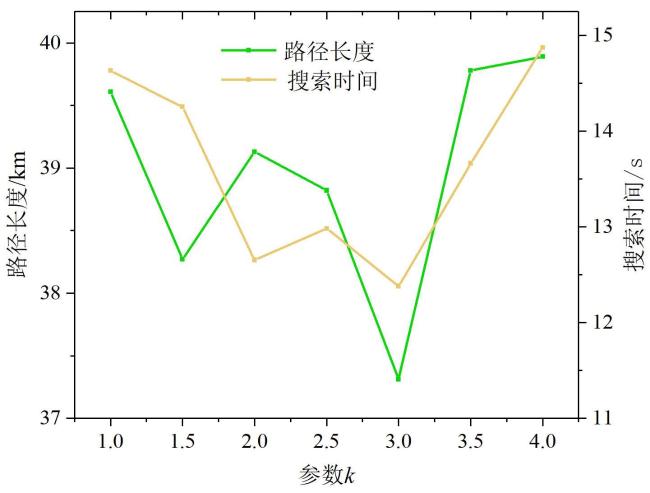
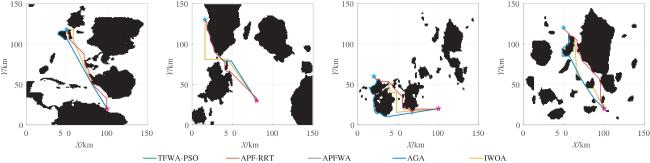
 图1 水下AUV全局路径规划示意图图2 水下三角形法环境建模图图3 高斯分布和柯西分布图像的比较图4 参数k与路径长度的关系图5 简单环境下路径规划对比图
图1 水下AUV全局路径规划示意图图2 水下三角形法环境建模图图3 高斯分布和柯西分布图像的比较图4 参数k与路径长度的关系图5 简单环境下路径规划对比图 表1 低覆盖率环境下5种算法仿真数据对比图6 4种二进制地图下对比算法的路径规划图表2 测试算法在基准测试函数上的实验结果图7 不同测试函数下算法收敛对比图
表1 低覆盖率环境下5种算法仿真数据对比图6 4种二进制地图下对比算法的路径规划图表2 测试算法在基准测试函数上的实验结果图7 不同测试函数下算法收敛对比图
/
| 〈 |
|
〉 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}