 PDF(1084 KB)
PDF(1084 KB)

Two-Stage Robust Optimization Method for UAV Task Assignment Under Uncertain Demand
WANG Wei, XIE Hui, WEI Zhong-cheng, ZHAO Ji-jun, PENG Li
ACTA ELECTRONICA SINICA ›› 2024, Vol. 52 ›› Issue (10) : 3552-3561.
PDF(1084 KB)
PDF(1084 KB)
Two-Stage Robust Optimization Method for UAV Task Assignment Under Uncertain Demand
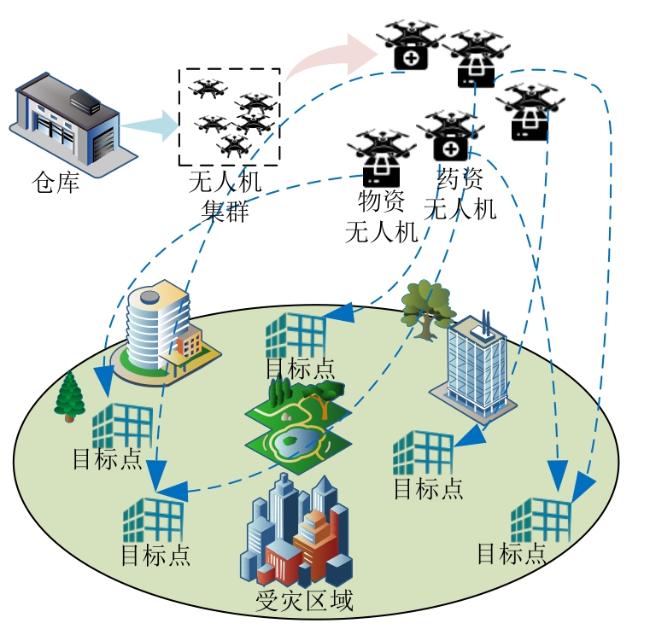
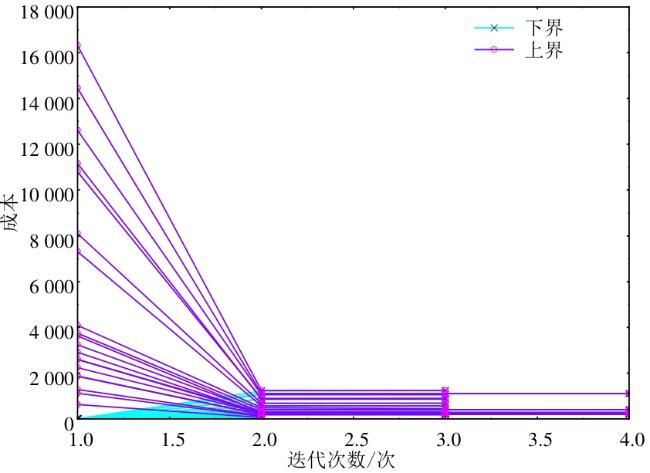
In disaster scenarios, the application of UAV (Unmanned Aerial Vehicle) for resource delivery holds considerable promise. However, the complexity and volatility of emergency environments, along with the spatial and temporal uncertainties associated with various unexpected events, can lead to inaccuracies in assessing resource demands at target points, which in turn may affect the UAV task allocation strategies in resource distribution. To address this issue, a two-stage robust optimization approach is introduced into the UAV task assignmet model. By integrating UAV assignment with task allocation, the model leverages the resources of the UAV fleet to minimize task assignment costs under maximum demand variability. This paper models the relationship between injury severity levels and resource demand variations, categorizing resource demand into three levels to achieve an accurate representation of total task allocation cost variations. The C&CG (Column-and-Constraint Generation) algorithm is used to address UAV task assignment under uncertain resource demand conditions. Finally, three types of experiments were designed and the simulation results validated the effectiveness and superiority of the algorithm. Compared to the deterministic model, this algorithm showed greater robustness in handling demand variation.
urban disaster / UAV task assignment / two-stage robust optimization / uncertain demand / multi-level demand / C&CG {{custom_keyword}} /
| 算法1 C&CG算法 |
|---|
| 输入: 输出:最优值 1.将 2.求解主问题获得最优值 3.计算并更新下界 4.WHILE 5. 将变量 6. IF 子问题可解 7. 获得需求值 8. 更新上界 9. 将新变量 10. ELSE 将新变量 11. END IF 12. 更新场景序号 13.END WHILE |
表1 仿真参数设置 |
| 参数名称 | 参数符号 | 参数取值 |
|---|---|---|
| 无人机启用成本 | | |
| 无人机运送资源单位成本 | | |
| 未满足需求的单位惩罚成本 | | 50 |
| 目标点人员数目/人 | | |
| 目标点与无人机的距离/ | | |
| 需求等级预算 | | |
| 目标点基本需求量/ | | |
| 受伤人员人均增量/ | | |
| 受伤人数等级调节参数 | | |
| 无人机最大载重/ | | 6 |
| 无人机最大综合航程/ | | 36 |
| 无人机单位载重的路程消耗/( | | 3 |
| 目标点数量/个 | | |
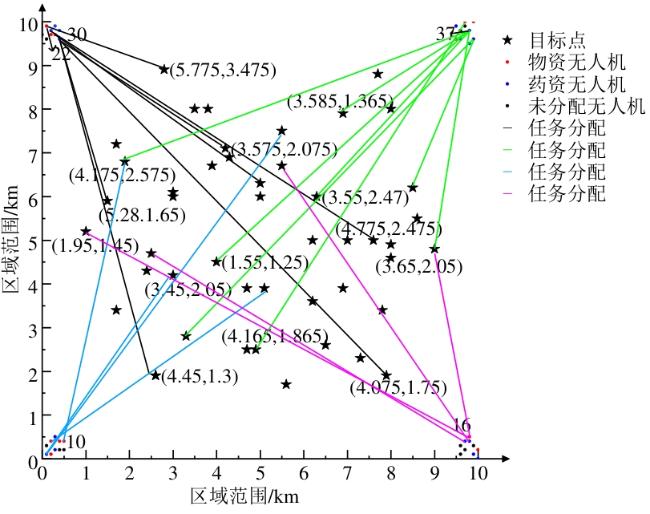
表2 无人机任务分配方案 |
| UAV数量/架 | 目标点数数量/个 | UAV启用数量/架 | UAV分配 | 成本 | C&CG迭代数/次 |
|---|---|---|---|---|---|
| 10 | 3 | 4 | | 95.182 50 | 2 |
| 6 | 7 | | 221.317 5 | 2 | |
| 9 | 10 | | | 4 | |
| 11 | 10 | | 408.252 5 | 3 | |
| 13 | 10 | | 546.787 4 | 4 | |
| 具体分配方案 | | ||||
| 15 | 5 | 6 | | 165.120 0 | 2 |
| 9 | 14 | | | 3 | |
| 13 | 15 | | 434.807 5 | 4 | |
| 16 | 15 | | 549.852 5 | 3 | |
| 19 | 15 | | | 4 | |
| 具体分配方案 | | ||||
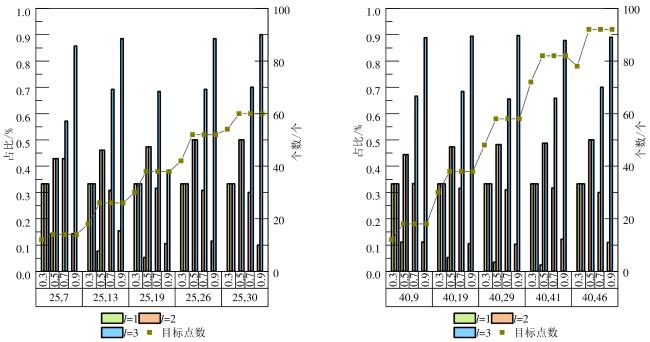
| 25 | 7 | 10 | | 238.120 0 | 3 |
| 13 | 17 | | 445.987 5 | 3 | |
| 19 | 19 | | | 3 | |
| 26 | 19 | | 888.882 6 | 3 | |
| 30 | 19 | | 1 058.775 0 | 3 | |
| 具体分配方案 | | ||||
| 40 | 9 | 16 | | | 3 |
| 19 | 20 | | | 3 | |
| 29 | 21 | | 858.027 5 | 3 | |
| 41 | 23 | | 1 100.785 0 | 3 | |
| 46 | 23 | | 1 231.235 0 | 3 | |
| 具体分配方案 | | ||||
表3 确定性模型与两阶段鲁棒模型的数据对比 |
| UAV 数量/架 | 目标点数量/个 | 确定性模型 | 两阶段鲁棒模型 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C&CG | Benders | ||||||||||||
| UAV 分配 成本 | 总成本 | 是否收敛 | UAV 分配 成本 | 总成本 | 迭代数/次 | 需求增长率/% | 是否收敛 | UAV分配成本 | 总成本 | 迭代数/次 | 是否收敛 | ||
| 6 | 4 | 4.2 | 107.993 2 | 是 | 4.2 | | 2 | 9.31 | 是 | 4.2 | | 235 | 是 |
| 6 | 7.2 | 307.119 1 | 是 | 8.6 | 392.127 0 | 2 | 8.30 | 是 | 6.2 | 304.086 8 | 235 | 是 | |
| 8 | 9.2 | 567.525 5 | 是 | 10.6 | | 2 | 9.05 | 是 | 5.2 | | 235 | 是 | |
| 8 | 5 | 7.7 | 150.243 2 | 是 | 11.1 | | 2 | 9.73 | 是 | 9.7 | | 1 696 | 是 |
| 8 | 11.7 | 288.596 0 | 是 | 16.1 | 375.882 5 | 2 | 7.62 | 是 | 9.7 | 324.746 9 | 1 698 | 是 | |
| 11 | 15.1 | 328.938 6 | 是 | 16.1 | | 2 | 11.98 | 是 | 9.7 | | 1 668 | 是 | |
| 10 | 6 | 10.5 | 121.100 0 | 是 | 16.9 | 221.317 5 | 2 | 8.94 | 是 | >2 500 | 否 | ||
| 10 | 15.9 | 248.708 6 | 是 | 21.1 | 378.590 0 | 2 | 9.20 | 是 | >2 500 | 否 | |||
| 14 | 19.9 | 503.335 7 | 是 | 21.1 | 568.050 6 | 2 | 8.57 | 是 | >2 500 | 否 | |||
| 13 | 7 | 13.5 | 148.287 6 | 是 | 17.9 | 247.710 0 | 2 | 9.27 | 是 | >2 500 | 否 | ||
| 13 | 22.4 | 333.753 9 | 是 | 30.6 | 478.932 5 | 2 | 9.18 | 是 | >2 500 | 否 | |||
| 18 | 27.6 | 441.440 7 | 是 | 30.6 | 710.372 1 | 2 | 9.24 | 是 | >2 500 | 否 | |||
| 15 | 8 | 13.5 | 187.05 | 是 | 24.9 | 285.510 0 | 2 | 9.05 | 是 | >2 500 | 否 | ||
| 15 | 22.9 | 355.932 9 | 是 | 34.6 | 501.552 5 | 2 | 8.65 | 是 | >2 500 | 否 | |||
| 20 | 30.1 | 439.523 4 | 是 | 34.6 | 765.067 5 | 2 | 9.18 | 是 | >2 500 | 否 | |||
| 1 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
张在琛, 江浩. 智能超表面使能无人机高能效通信信道建模与传输机理分析[J]. 电子学报, 2023, 51(10): 2623-2634.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
任双, 周洁, 高嵩, 等. 基于注意力机制的无人机集群协同分群控制算法[J]. 电子学报, 2023, 51(7): 1898-1905.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 22 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 23 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 24 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 25 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 26 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 27 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 28 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 29 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 30 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 31 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(1084 KB)
PDF(1084 KB)

/
| 〈 |
|
〉 |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}