 PDF(1063 KB)
PDF(1063 KB)
 PDF(1063 KB)
PDF(1063 KB)
PDF(1063 KB)
PDF(1063 KB)
平行分层海域中电偶极子源的定位方法研究
Research on Localization Method of Electric Dipole Sources in Parallel Layered Seas
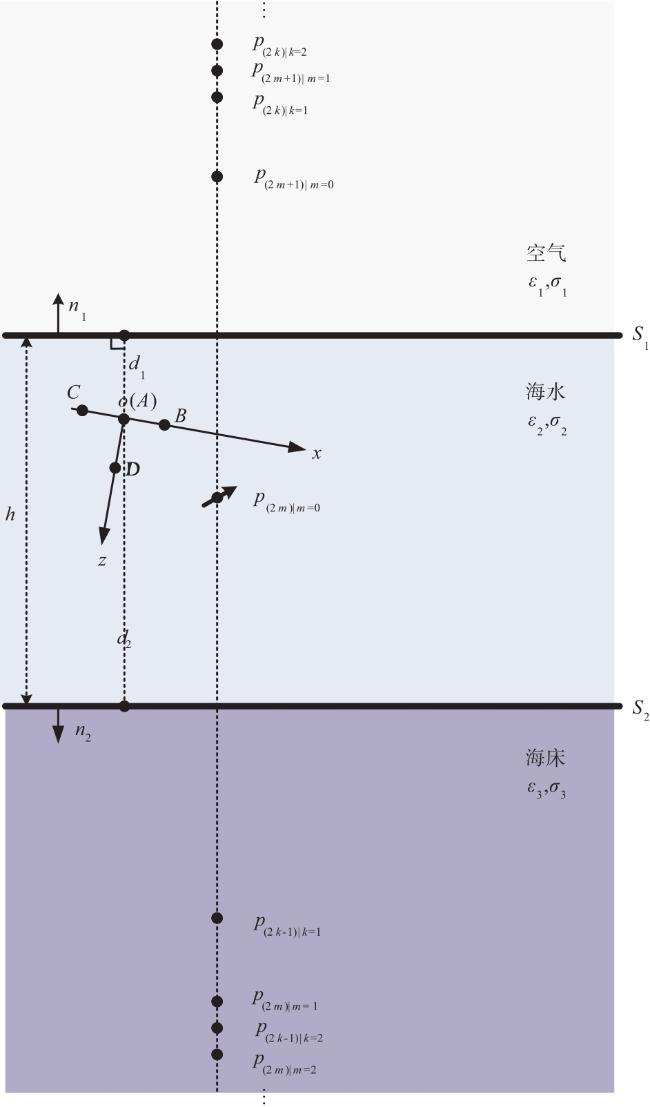
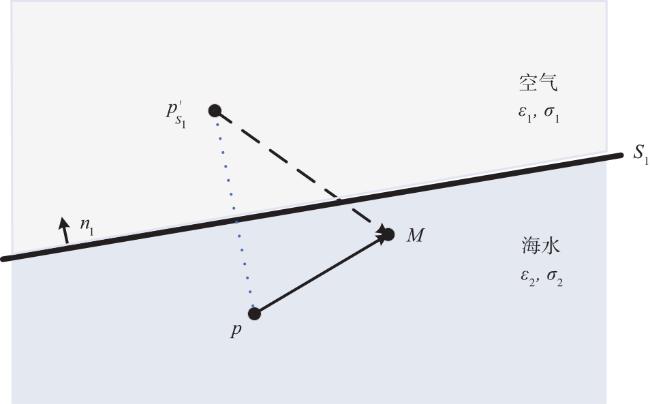
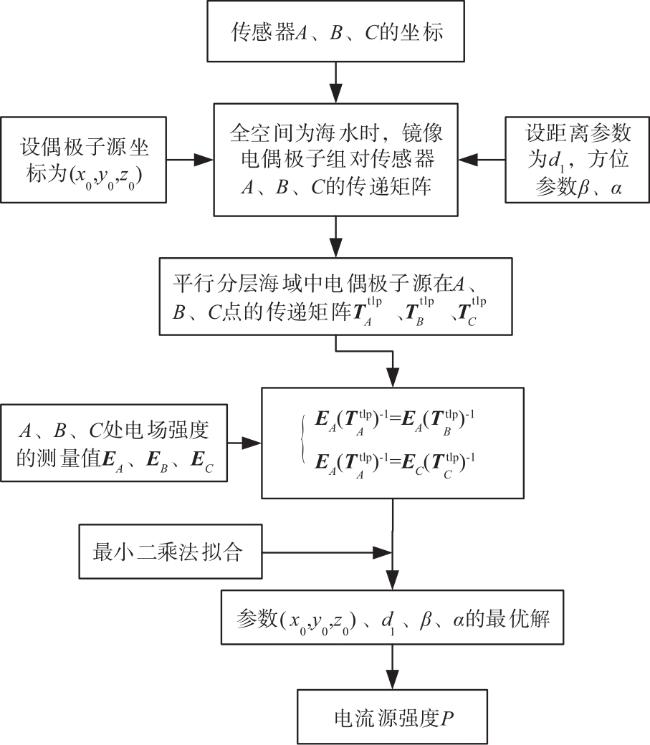
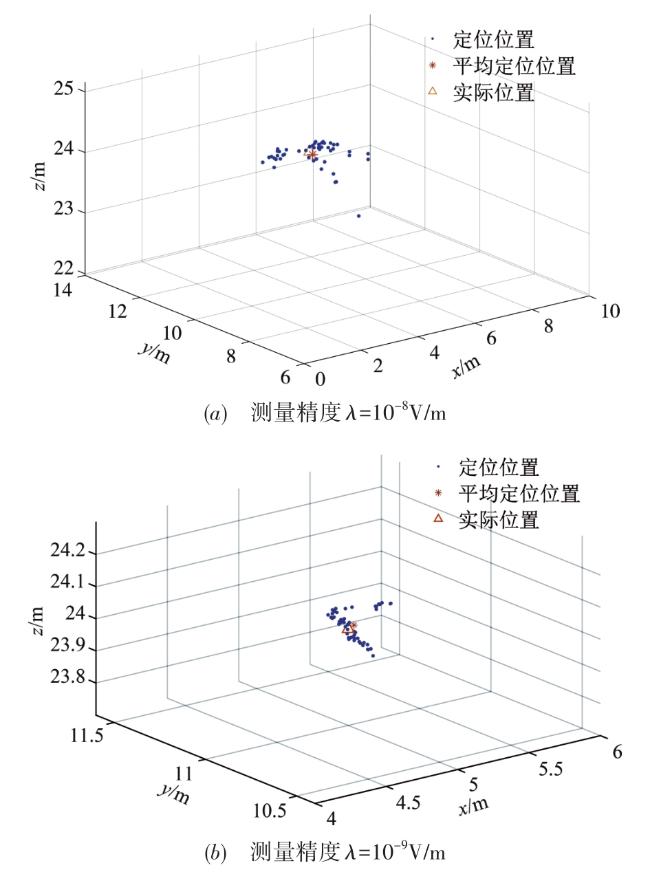
针对平行分层海域中电偶极子源的定位问题,提出利用三个电场强度传感器同时确定场源位置、场源强度及分界面方位共9个参量的方法.首先借助镜像法及边界条件推导了三层平行分层海域中电偶极子源在海水中产生电场强度的矩阵表达式,引入场强传递矩阵,然后通过传递矩阵求逆的方法消除电偶极子源的偶极矩参数,得到以电偶极子源位置及分界面方位为未知量的非线性方程组,将待确定的9个未知参数减少为6个待拟合量,并通过拟合的方法得到电偶极子源位置和分界面方位的最优解.最后通过仿真算例检验所提方法的有效性.结果表明,该定位方法在一定条件下可以较精确地确定场源位置、分界面方位.该方法经适当完善还可以应用于鱼雷等水下航行器的制导过程.
Aiming at the location of electric dipole sources in parallel layered seas, a method of using three electric field intensity sensors to simultaneously determine the field source position, electric dipole moment, and interface orientation is proposed. First, the matrix expressions of electric field strength generated by electric dipole sources in three layers of parallel and layered seas in seawater were derived by using the mirror method and boundary conditions. The field strength transfer matrix was introduced, and the electric dipoles were eliminated by the inversion of the transfer matrix. The parameters of the dipole moments of the sub-sources are used to obtain a set of nonlinear equations in which the position of the electric dipole source and the orientation of the interface are unknown. The 9 unknown parameters to be determined are reduced to 6 quantities to be fitted, and the optimal solution of the electric dipole source position and interface orientation is obtained through the fitting method. Finally, the validity of the proposed method is verified by simulation examples. The results show that the localization method can accurately determine the position of the field source and the orientation of the interface under certain conditions. The method can also be applied to torpedo guidance process after proper improvement.
平行分层海域 / 电偶极子 / 定位 / 镜像法 / 传递矩阵 {{custom_keyword}} /
parallel layered seas / electric dipole / locating / method of images / transfer matrix {{custom_keyword}} /
表1 平行分层海域中电偶极子源的定位结果 |
| λ/(V/m) | (x 0,y 0,z 0) /m | (α;β) /m | d 1/m | P/Am | δ/m | δα/α;δβ/β | δd 1/ d 1 | δ P./ P |
|---|---|---|---|---|---|---|---|---|
| 10-8 | (4.42,10.29,24.15) | (0.79;1.01) | 10.24 | (3.88,1.39,1.03) | 0.93 | 0.1%;3.8% | 2.4% | (3.0%,26.0%,28.8%) |
| 10-9 | (5.06,11.00,23.99) | (0.78;1.05) | 10.00 | (3.99,1.48,0.79) | 0.06 | 1.3%;0.1% | 0.1% | (0.3%,1.3%,1.3%) |
| 1 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
王向军, 张建春, 徐庆林. 层流介质中曲面螺旋桨旋转对腐蚀静电场的影响[J]. 电子学报, 2019, 47(11): 2330 - 2336.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
张华, 王向军, 单潮龙, 等. 基于目标静电场的水中兵器制导方法研究[J]. 电子学报, 2013, 41(3): 470 - 474.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
姜润翔, 张伽伟, 林春生. 基于点电荷模型的腐蚀相关静电场快速预测方法研究[J]. 兵工学报, 2017, 38(4): 735 - 743.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
李建飞, 万文涛, 景建恩. 层状地电模型中有限长导线源电磁场的正演计算[J].勘察科学技术, 2016, (6):35 - 39.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
肖春燕, 雷银照. 分层球形导体中任意位置直流电流元产生电位的解析解[J]. 物理学报, 2005, 54(4): 1950 - 1957.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
陈聪, 李定国, 龚沈光. 基于拉氏方程的舰船静态电场深度换算[J]. 电子学报, 2010, 38(9): 2025 - 2029.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
包中华, 龚沈光, 孙剑英, 等. 使用双矢量传感器定位深海中水平直流电偶极子源[J]. 海军工程大学学报, 2011, 23(3): 53 - 57.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
吴重庆, 赵爽. 电偶极子源定位问题的研究[J]. 物理学报, 2007, 56(9): 5180 - 5184.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
李涛, 王向军, 嵇斗. 浅海中时谐水平电偶极子定位研究[J]. 舰船电子工程, 2015, 35(5): 142 - 146.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
卢新城, 龚沈光, 周骏, 等. 海水中时谐水平电偶极子的准近场定位[J]. 武汉理工大学学报(交通科学与工程版), 2005, 29(3): 331 - 334.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
陈聪, 李定国, 蒋治国, 等. 二次等效法求三层媒质中静态电偶极子的场分布[J]. 物理学报, 2012, 61(24): 244101.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(1063 KB)
PDF(1063 KB)
 图1 平行分层海域中镜像电偶极子的相对位置示意图图2 场点位于海水中时电偶极子与像的位置关系图3 平行分层海域中电偶极子源定位的流程图图4 不同测量精度时电偶极子源的定位结果
图1 平行分层海域中镜像电偶极子的相对位置示意图图2 场点位于海水中时电偶极子与像的位置关系图3 平行分层海域中电偶极子源定位的流程图图4 不同测量精度时电偶极子源的定位结果 表1 平行分层海域中电偶极子源的定位结果
表1 平行分层海域中电偶极子源的定位结果

/
| 〈 |
|
〉 |







{kind=link}
{kind=link}
{kind=link}
{kind=link}