 PDF(2090 KB)
PDF(2090 KB)
 PDF(2090 KB)
PDF(2090 KB)
PDF(2090 KB)
PDF(2090 KB)
基于LSTM-DHMM的MOSFET器件健康状态识别与故障时间预测
Health Status Identification and Fault Time Prediction of MOSFET Device Based on LSTM-DHMM
针对MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor)器件故障预测与健康管理问题,提出了一种长短时记忆(Long Short-Term Memory, LSTM)算法与离散隐马尔可夫模型(Discrete Hidden Markov Model, DHMM)相结合的故障预测新方法.该方法利用LSTM算法预测器件状态发展趋势;用自回归(AutoRegressive, AR)模型提取故障信息特征;以DHMM建立特征向量和退化等级之间的映射关系;在LSTM-DHMM模型预测结果的基础上,结合失效阈值排除虚警并预测故障时间,预测误差小于10%,精度较高.与GRU-DHMM(Gated Recurrent Unit Discrete Hidden Markov Model)、GRU-SVM(Gated Recurrent Unit Support Vector Machine)、LSTM-SVM(Long Short-Term Memory Support Vector Machine)方法进行对比分析,结果表明,LSTM-DHMM的预测准确率高于其他三种方案,能有效识别实验器件健康状态、较好预测故障时间,具有有效性和优越性.
Aiming at the problem of MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor) device prognostic and health management, a fault prediction method combining long short term memory(LSTM) algorithm and discrete hidden Markov model(DHMM) is proposed to identify the health status and predict the fault time of MOSFET devices. In this method, LSTM algorithm is used to predict the development trend of device state; autoregressive(AR) model is used as the feature extraction method; DHMM is used to establish the mapping relationship between feature vector and degradation level; based on the prediction results of LSTM-DHMM model, false alarm is eliminated and fault time is predicted by combining with the failure threshold. The prediction error is less than 10% and the accuracy is high. Compared with single-stress GRU-DHMM(Gated Recurrent Unit Discrete Hidden Markov Model)、GRU-SVM(Gated Recurrent Unit Support Vector Machine) and LSTM-SVM(Long Short-Term Memory Support Vector Machine), the proposed method is superior to the other four schemes in prediction accuracy and rationality, the results show that the prediction accuracy of the proposed method is higher than that of the other three schemes, and the proposed method can effectively identify the health state of the experimental devices and predict the fault time well, which is effective and superior.
故障预测与健康管理 / MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor) / 长短时序列 / 离散隐马尔可夫模型 / 自回归模型 / 故障时间 {{custom_keyword}} /
prognostic and health management / MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor) / long short-term memory / discrete hidden Markov model / autoregressive model / fault time {{custom_keyword}} /
表1 三种优化算法的均方根误差 |
| 实验 序号 | 优化算法 | ||
|---|---|---|---|
| Adam | SGDM | RMSProp | |
| 1 | 0.00814 | 0.00832 | 0.00951 |
| 2 | 0.00912 | 0.02174 | 0.01846 |
| 3 | 0.00898 | 0.01944 | 0.01633 |
| 4 | 0.00665 | 0.00741 | 0.00786 |
| 5 | 0.00814 | 0.00997 | 0.01021 |
表2 ACF与PACF值 |
| ACF | PACF | ACF | PACF |
|---|---|---|---|
| 0.990 | 0.990 | 0.854 | -0.004 |
| 0.980 | 0.020 | 0.848 | -0.010 |
| 0.972 | 0.070 | 0.842 | -0.002 |
| 0.964 | -0.006 | 0.836 | -0.009 |
| 0.953 | -0.113 | 0.831 | 0.008 |
| 0.943 | 0.010 | 0.825 | -0.006 |
| 0.935 | 0.048 | 0.819 | -0.003 |
| 0.926 | 0.022 | 0.813 | 0.009 |
| 0.917 | -0.022 | 0.807 | 0.000 |
| 0.909 | 0.024 | 0.801 | -0.009 |
| 0.901 | 0.038 | 0.796 | 0.008 |
| 0.894 | 0.018 | 0.790 | -0.004 |
| 0.887 | 0.005 | 0.784 | 0.002 |
| 0.881 | 0.041 | 0.778 | -0.013 |
| 0.875 | 0.016 | 0.773 | 0.006 |
| 0.870 | 0.013 | 0.767 | -0.012 |
| 0.864 | 0.002 | 0.761 | 0.006 |
| 0.859 | 0.005 | 0.755 | -0.014 |
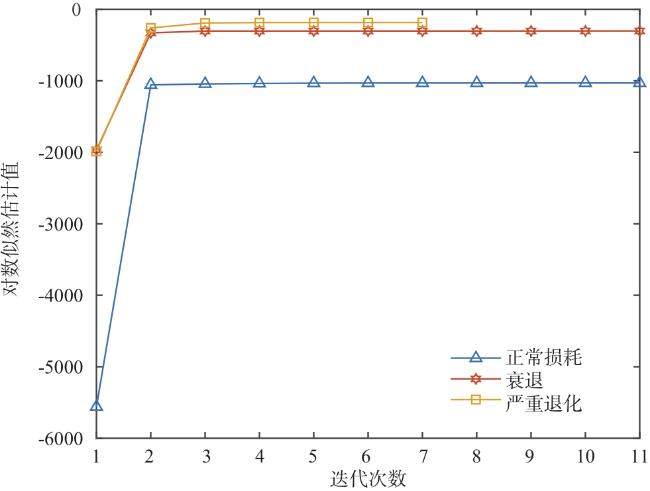
表3 DHMM分类器下三种状态的对数似然概率与识别结果 |
| 实验 序号 | 三种退化状态DHMM输出的对数似然概率 | 识别结果 | ||
|---|---|---|---|---|
| 正常损耗期 | 衰退期 | 严重退化期 | ||
| 1 | -54.41 | -45.42 | -33.04 | 严重退化期 |
| 2 | -129.05 | -133.25 | -173.86 | 正常损耗期 |
| 3 | -78.91 | -79.17 | -145.01 | 正常损耗期 |
| 4 | -116.78 | -116.39 | -167.30 | 衰退期 |
| 5 | -178.76 | -186.99 | -137.32 | 严重退化期 |
表4 三种时间序列预测方法的均方差 |
| 实验序号 | 预测方法 | ||
|---|---|---|---|
| 二维离散时域信号GRU网络 | 单应力LSTM | 二维离散时域信号LSTM | |
| 1 | 0.06352 | 0.06678 | 0.06576 |
| 2 | 0.05785 | 0.05790 | 0.05367 |
| 3 | 0.04751 | 0.04932 | 0.04750 |
| 4 | 0.04483 | 0.04572 | 0.04452 |
| 5 | 0.03267 | 0.02984 | 0.03690 |
表5 三种时间序列预测方法的均方根误差 |
| 实验序号 | 预测方法 | ||
|---|---|---|---|
| 二维离散时域信号GRU网络 | 单应力LSTM | 二维离散时域信号LSTM | |
| 1 | 0.00797 | 0.00822 | 0.00814 |
| 2 | 0.00771 | 0.01092 | 0.00912 |
| 3 | 0.00806 | 0.01082 | 0.00898 |
| 4 | 0.00862 | 0.00867 | 0.00665 |
| 5 | 0.01672 | 0.02230 | 0.00814 |
表6 对比方案构成与本文所提预测方法 |
| 预测方法 | 时间序列预测 | 健康状态识别 |
|---|---|---|
| 方案1 | 二维离散时域信号GRU网络 | DHMM |
| 方案2 | 二维离散时域信号GRU网络 | SVM |
| 方案3 | 二维离散时域信号LSTM | SVM |
| 本文 | 二维离散时域信号LSTM | DHMM |
表7 对比方案的识别结果 |
| 实验序号 | 识别结果 | 真实状态 | ||
|---|---|---|---|---|
| 二维离散时域信号 GRU-DHMM | 二维离散时域信号 GRU-SVM | 二维离散时域信号 LSTM-SVM | ||
| 1 | 衰退期 | 正常损耗期 | 严重退化期 | 正常损耗期 |
| 2 | 正常损耗期 | 衰减阶段 | 正常损耗期 | 正常损耗期 |
| 3 | 正常损耗期 | 正常损耗期 | 正常损耗期 | 正常损耗期 |
| 4 | 衰退期 | 正常损耗期 | 正常损耗期 | 衰退期 |
| 5 | 衰退期 | 正常损耗期 | 严重退化期 | 严重退化期 |
| 识别准确率 | 60% | 40% | 60% | —— |
表8 R DS(on)参数漂移百分比 |
| 实验序号 | 1 | 5 |
|---|---|---|
| 漂移百分比 | 1.46% | 21.41% |
表9 预测故障时间与实际故障时间 |
| 预测故障时间 | 实际故障时间 | 相对误差 |
|---|---|---|
| 257 min | 263 min | 2.3% |
| 1 |
樊浩,李兴文,苏海博,等.基于主成分分析—支持向量机优化模型的断路器故障诊断方法研究[J].高压电器, 2020, 56(6): 143-151.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
刘磊,龙兵,刘震.两种多故障诊断算法的性能比较研究[J].电子测量与仪器学报, 2011, 25(1): 75-80.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
陈颖,高蕾,康锐.基于故障物理的电子产品可靠性仿真分析方法[J].中国电子科学研究院学报, 2013, 8(5): 444-448.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
杨立峰,吕卫民,肖阳.基于故障机理和伪失效寿命的电子产品剩余寿命预测[J].海军航空工程学院学报, 2017, 32(2): 246-250.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
周永道,王会琦,吕王勇.时间序列分析及应用[M]. 北京: 高等教育出版, 2015.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
郝俊虎,胡毅.基于XGBoost和自回归模型的轴承故障诊断和预警方法研究[J].组合机床与自动化加工技术, 2020, 552(2): 140-142, 157.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
伊恩.古德费洛, 约书亚.本吉奥, 亚伦.库维尔. 深度学习[M].北京: 人民邮电出版社, 2017. 187-190.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
张峰,王东,石现峰.振动信号Burg谱估计算法的性能优化研究[J].计算机仿真, 2017, 34(4): 262-266.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
于劲松,刘浩,张平,等.故障预测算法稳定性实时评估方法[J].北京航空航天大学学报,2014,40(9): 1208-1212.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(2090 KB)
PDF(2090 KB)
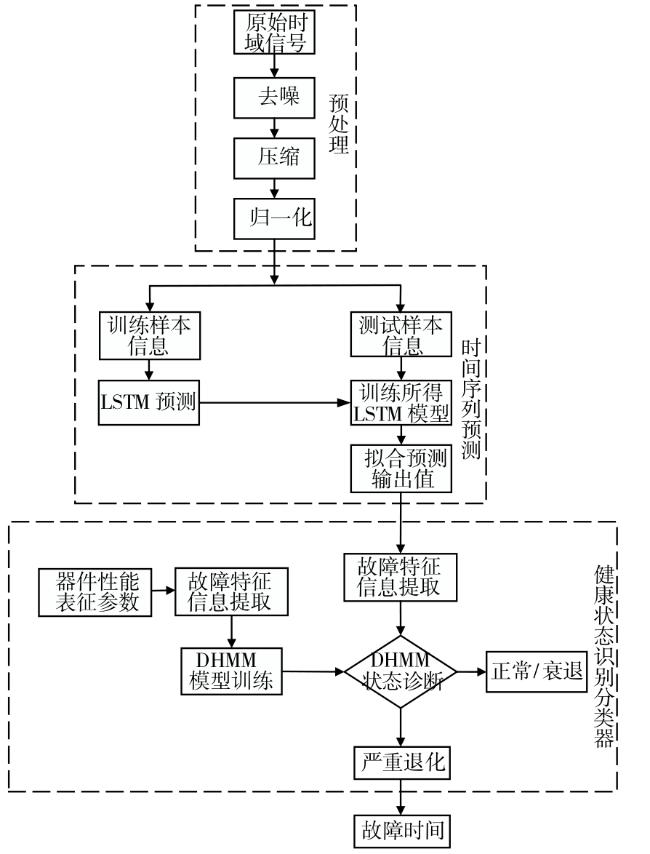
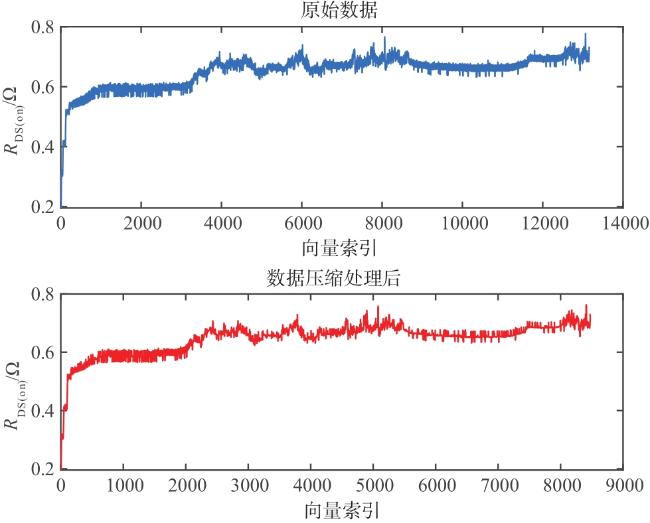
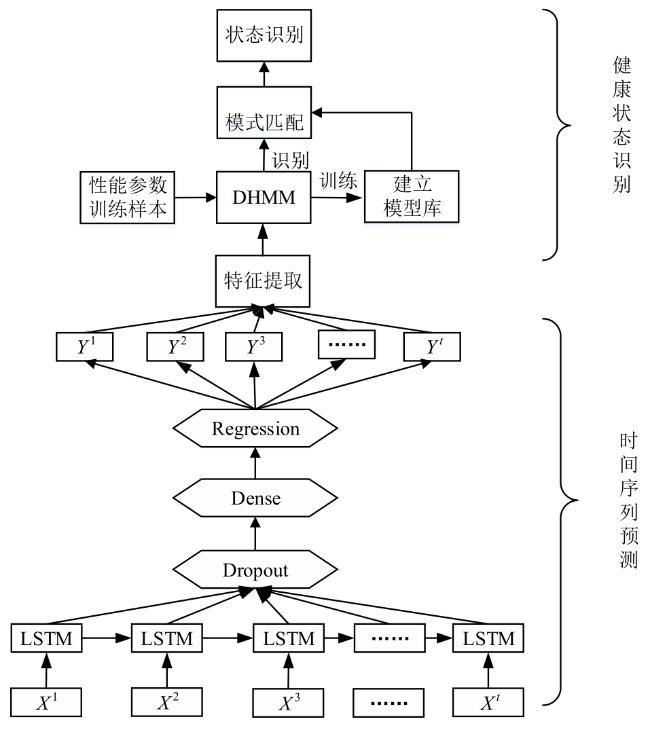
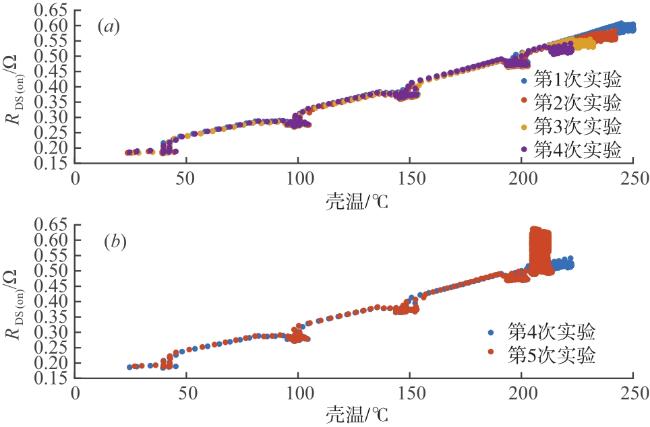
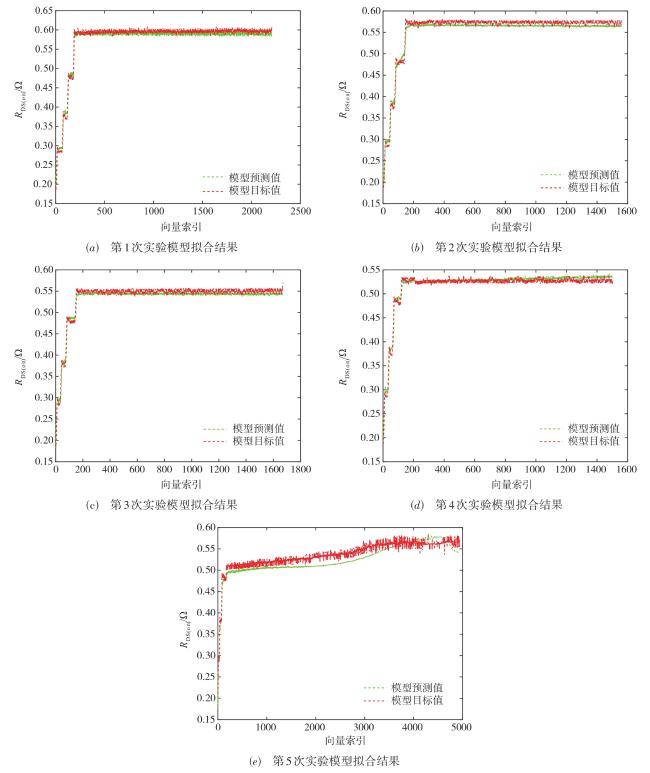
 图1 LSTM-DHMM预测流程图2 数据压缩前后对比图图3 LSTM-DHMM模型框架图4 五次实验RDS(on)变化趋势图
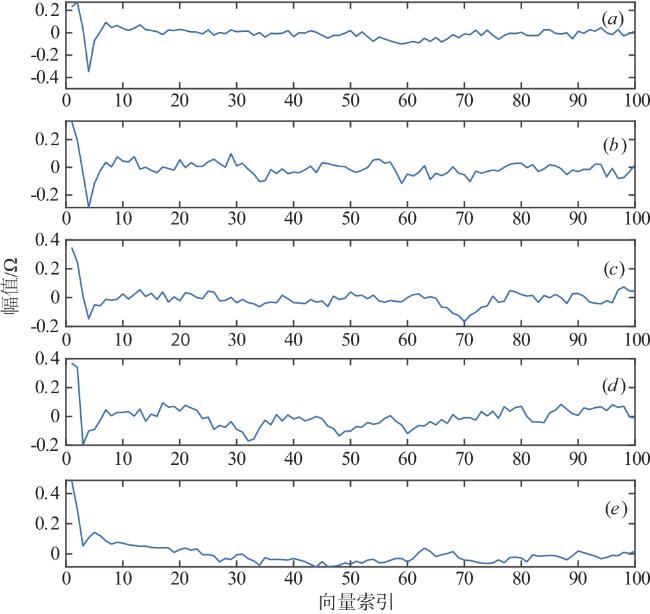
图1 LSTM-DHMM预测流程图2 数据压缩前后对比图图3 LSTM-DHMM模型框架图4 五次实验RDS(on)变化趋势图 表1 三种优化算法的均方根误差图5 模型拟合结果表2 ACF与PACF值图6 五次实验AR模型参数图7 三种状态的DHMM迭代曲线表3 DHMM分类器下三种状态的对数似然概率与识别结果表4 三种时间序列预测方法的均方差表5 三种时间序列预测方法的均方根误差表6 对比方案构成与本文所提预测方法表7 对比方案的识别结果表8 R DS(on)参数漂移百分比表9 预测故障时间与实际故障时间
表1 三种优化算法的均方根误差图5 模型拟合结果表2 ACF与PACF值图6 五次实验AR模型参数图7 三种状态的DHMM迭代曲线表3 DHMM分类器下三种状态的对数似然概率与识别结果表4 三种时间序列预测方法的均方差表5 三种时间序列预测方法的均方根误差表6 对比方案构成与本文所提预测方法表7 对比方案的识别结果表8 R DS(on)参数漂移百分比表9 预测故障时间与实际故障时间

/
| 〈 |
|
〉 |








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}