 PDF(3483 KB)
PDF(3483 KB)
 PDF(3483 KB)
PDF(3483 KB)
PDF(3483 KB)
PDF(3483 KB)
基于非线性跨代差分进化的花授粉优化算法及其应用研究
A Flower Pollination Algorithm Based on Nonlinear Cross-Generation Differential Evolution and Its Application Study
针对高维度变量的优化问题,本文设计了一种基于非线性跨代差分进化的花授粉优化算法.该算法利用跨代差分进化引导个体逼近最优解,使算法的局部搜索过程具备导向性,并设置非线性惯性权重提升算法的搜索收敛速度.同时,通过参数自适应调整实现缩放因子和交叉概率的动态更新,从而提高种群丰富度、减少局部解的数量,再结合跨代赌轮盘方式以降低陷入局部最优解的概率.仿真验证表明,该算法能够在不同维度测试函数下保持较好的寻优特性和稳定性,尤其在高维度测试函数下的寻优性能更好.同时,本文以工业互联网中的无人机智能巡检的路径规划为例,评估了算法在实际应用中的性能.实验结果表明该算法可以满足巡检路径规划的低成本、高效率和规避外部攻击的需求.
For the optimization problem of high-dimensional variables, we design a flower pollination algorithm based on nonlinear cross-generation differential evolution (FPA-NCDE). The algorithm guides individuals to approximate the optimal solution with cross-generation differential evolution to make local search process oriented. Meanwhile, the nonlinear inertia weight is set to improve the search convergence speed. The scaling factor and crossover probability are dynamically updated by parameter adaptive adjustment to enhance the population richness and reduce the number of local solutions. Combined with the cross-generation roulette wheel, the probability of trapping into local optimal solution is decreased. The performance evaluation verifies that the proposed FPA-NCDE can maintain good optimization characteristics and stability under different dimensional benchmark functions, especially under high dimensional test functions. In addition, FPA-NCDE is applied to unmanned aerial vehicle intelligent inspection of industrial internet to evaluate the performance of the algorithm in practical applications. The experiments results show that FPA-NCDE can satisfy the needs of low cost, high efficiency and avoidance of external attacks in inspection path planning.
花授粉算法 / 跨代差分进化 / 赌轮盘 / 智能巡检 / 无人机 / 路径规划 {{custom_keyword}} /
flower pollination algorithm / cross-generation differential evolution / roulette wheel / intelligent inspection / unmanned aerial vehicle / path planning {{custom_keyword}} /
| |
|---|
| 输入:种群规模大小 输出:种群的全局最优解. Begin 1.随机选择全局最优解 2.设置最大迭代次数 3.设置转换概率 4.FOR每一个个体 5. 根据 6. IF 7. IF 8. 对于花粉个体 9. ELSE: 10. 对于花粉个体 11. ELSE : 12. 根据 13. 根据 14. End IF 15. 利用跨代赌轮盘方式产生 16. 将赌轮盘产生的个体 17. 再将 18. 将后代个体 19.End FOR 20.重复执行Step3~Step19直到迭代次数达到 End |
表1 消融试验相关算法 |
| 算法 | 非线性惯性权重设置 | 跨代差分进化 | 参数自适应调整 | 跨代赌轮盘 |
|---|---|---|---|---|
| FPA-NCDE | √ | √ | √ | √ |
| FPA-NCDE(w/o CRW) | × | √ | √ | × |
| FPA-NCDE(w/o CDE) | √ | × | × | √ |
| FPA-NCDE(w/o PAD) | × | √ | √ | √ |
表2 测试函数优化结果 |
| 测试函数 | FPA-NCDE | FPA-NCDE (w/o CRW) | FPA[16] | ABC[10] | PSO[14] | GA[15] | SSO[11] |
|---|---|---|---|---|---|---|---|
| HARTMANN 6-DIMENSIONAL FUNCTION | 3.04E+00 | -3.01E+00 | -3.01E+00 | -3.04E+00 | -3.00E+00 | -3.01E+00 | -3.03E+00 |
| SCHAFFER FUNCTION | 0.00E+00 | 5.00E-03 | 5.01E-03 | 1.53E-09 | 0.00E+00 | 1.08E-03 | 3.83E-10 |
| SHEKEL FUNCTION | -1.05E+01 | -7.21E+00 | -7.20E+00 | -1.05E+01 | 5.80E+00 | -6.51E+00 | -1.05E+01 |
| ACKLEY FUNCTION | 9.57E-10 | 1.48E+01 | 1.50E+01 | 5.75E-06 | 4.16E+00 | 1.527E+01 | 2.90E-01 |
| RASTRIGIN FUNCTION | 0.00E+00 | 2.33E+02 | 2.35E+02 | 1.80E-02 | 3.94E+01 | 2.43E+02 | 4.72E+01 |
| SCHWEFEL FUNCTION | 3.81E-04 | 6.76E+03 | 6.93E+03 | 1.66E+02 | 9.29E+03 | 5.92E+03 | 6.78E+01 |
| MULTIMODAL FUNCTION | 1.01E+00 | 1.15E+01 | 1.16E+01 | 1.15E+00 | 6.24E+00 | 1.13E+01 | 3.55E+00 |
| STRECTCHED V FUNCTION | 1.25E-06 | 1.31E+01 | 1.32E+01 | 3.04E-01 | 2.01E+00 | 1.41E+01 | 2.92E+00 |
表3 测试函数优化结果方差 |
| 测试函数 | FPA-NCDE | FPA-NCDE (w/o CDE) | FPA[16] | ABC[10] | PSO[14] | GA[15] | SSO[11] |
|---|---|---|---|---|---|---|---|
| HARTMANN 6-DIMENSIONAL FUNCTION | 1.04E-16 | 2.90E-02 | 2.94E-02 | 9.06E-16 | 3.01E-02 | 2.82E-02 | 2.25E-02 |
| SCHAFFER FUNCTION | 0.00E+00 | 5.21E-03 | 5.24E-03 | 3.41E-09 | 0.00E+00 | 1.77E-03 | 1.00E-10 |
| SHEKEL FUNCTION | 1.16E-14 | 3.47E+00 | 3.49E+00 | 6.25E-05 | 3.37E+00 | 3.11E+00 | 1.55E-03 |
| ACKLEY FUNCTION | 4.66E-09 | 9.73E-00 | 9.75E-00 | 2.50E-00 | 6.54E-00 | 5.86E-01 | 3.30E-02 |
| RASTRIGIN FUNCTION | 0.00E+00 | 1.58E+01 | 1.60E+01 | 7.43E-02 | 8.91E+00 | 1.76E+01 | 1.00E+01 |
| SCHWEFEL FUNCTION | 1.01E-12 | 4.91E+02 | 4.91E+02 | 1.16E+02 | 3.60E+02 | 4.16E+02 | 3.60E+01 |
| MULTIMODAL FUNCTION | 1.81E+00 | 2.88E-01 | 2.93E-01 | 2.00E-01 | 8.47E-01 | 4.55E-01 | 8.16E-01 |
| STRECTCHED FUNCTION | 6.28E-06 | 1.58E+00 | 1.59E+00 | 8.79E-02 | 1.05E+00 | 1.22E+00 | 5.13E-01 |
表4 测试函数优化所需迭代次数 |
| 测试函数 | FPA-NCDE | FPA-NCDE (w/o PAD) | FPA[16] | ABC[10] | PSO[14] | GA[15] | SSO[11] |
|---|---|---|---|---|---|---|---|
| HARTMANN 6-DIMENSIONAL FUNCTION | 293 | 943 | 960 | 90 | 86 | 947 | 999 |
| SCHAFFER FUNCTION | 182 | 982 | 991 | 999 | 229 | 992 | 990 |
| SHEKEL FUNCTION | 107 | 986 | 998 | 126 | 74 | 970 | 980 |
| ACKLEY FUNCTION | 788 | 979 | 998 | 1000 | 526 | 996 | 1000 |
| RASTRIGIN FUNCTION | 229 | 984 | 1000 | 997 | 695 | 999 | 1000 |
| SCHWEFEL FUNCTION | 468 | 982 | 996 | 998 | 1000 | 971 | 642 |
| MULTIMODAL FUNCTION | 881 | 973 | 1000 | 999 | 1000 | 966 | 1000 |
| STRECTCHED V FUNCTION | 104 | 976 | 981 | 1000 | 634 | 978 | 1000 |
表5 低维测试函数优化结果 |
| 测试函数 | FPA-NCDE | FPA[16] | ABC[10] | PSO[14] | GA[15] | SSO[11] |
|---|---|---|---|---|---|---|
| F 1: BEALE FUNCTION (维度2) | 9.09E-26 (3.68E-25) | 4.14E-03 (7.07E-03) | 6.82E-10 (1.32E-09) | 0.00E+00 (0.00E+00) | 7.81E-02 (1.68E-01) | 1.52E-07 (1.70E-07) |
| F 2: BOHACHEVSKY FUNCTION (维度2) | 0.00E+00 (0.00E+00) | 2.25E-01 (2.27E-01) | 0.00E+00 (0.00E+00) | 0.00E+00 (0.00E+00) | 6.20E-01 (2.95E-01) | 1.93E-06 (1.42E-06) |
| F 3: COLVILLE FUNCTION (维度4) | 0.00E+00 (0.00E+00) | 1.73E+00 (1.37E+00) | 2.82E-01 (1.74E-01) | 0.00E+00 (0.00E+00) | 4.79E+01 (3.17E+01) | 1.27E-03 (5.92E-04) |
| F 4: CROSS-IN-TRAY FUNCTION (维度2) | -2.06E+00 (2.04E-11) | -2.06E+00 (1.87E-05) | -2.06E+00 (9.06E-16) | -2.06E+00 (9.06E-16) | -2.06E+00 (1.35E-15) | -2.06E+00 (1.26E-08) |
| F 5: DROP-WAVE FUNCTION (维度2) | -1.00E+00 (0.00E+00) | -9.51E-01 (2.72E-02) | -1.00E+00 (0.00E+00) | -1.00E+00 (0.00E+00) | -9.98E-01 (1.13E-16) | -9.99E-01 (4.68E-06) |
| F 6: EASOM FUNCTION (维度2) | -9.99E-01 (4.84E-05) | -7.99E-01 (3.50E-01) | -9.99E-01 (8.42E-06) | -1.00E+00 (0.00E+00) | -5.45E-01 (4.93E-01) | -1.00E+00 (2.14E-07) |
| F 7: GOLDSTEIN-PRICE FUNCTION (维度2) | 3.00E+00 (1.02E-15) | 3.00E+00 (3.00E-03) | 3.00E+00 (1.81E-07) | 3.00E+00 (1.21E-15) | 3.90E+00 (1.02E+00) | 3.000E+00 (3.69E-05) |
| F 8: HARTMANN 3-DIMENSIONAL FUNCTION (维度3) | -3.86E+00 (1.38E-15) | -3.86E+00 (7.53E-05) | -3.86E+00 (2.71E-15) | -3.86E+00 (2.66E-15) | -3.86E+00 (1.82E-05) | -3.86E+00 (4.26E-05) |
| F 9: HARTMANN 6-DIMENSIONAL FUNCTION (维度6) | -3.04E+00 (1.04E-16) | -3.01E+00 (2.94E-02) | -3.04E+00 (9.06E-16) | -3.00E+00 (3.01E-02) | -3.01E+00 (2.82E-02) | -3.03E+00 (2.25E-02) |
| F 10: HOLDER TABLE FUNCTION (维度2) | -1.92E+01 (3.83E-15) | -1.92E+01 (1.41E-03) | -1.92E+01 (7.77E-15) | -1.92E+01 (6.19E-15) | -1.92E+01 (5.22E-15) | -1.92E+01 (8.50E-07) |
| F 11: MICHALEWICZ FUNCTION (维度2) | -1.80E+00 (9.81E-16) | -1.80E+00 (2.76E-04) | -1.80E+00 (6.79E-16) | -1.80E+00 (6.79E-16) | -1.80E+00 (8.77E-08) | -1.80E+00 (2.09E-06) |
| F 12: PERM FUNCTION (维度2) | 2.13E-03 (2.13E-03) | 1.21E+01 (6.12E+00) | 1.86E-02 (1.71E-02) | 1.43E-01 (2.69E-01) | 4.47E+06 (9.96E+06) | 5.74E-02 (1.69E-01) |
| F 13: SCHAFFER FUNCTION (维度2) | 0.00E+00 (0.00E+00) | 5.01E-03 (5.24E-03) | 1.53E-09 (3.41E-09) | 0.00E+00 (0.00E+00) | 1.08E-03 (1.77E-03) | 3.83E-10 (1.00E-10) |
| F 14: SHEKEL FUNCTION (维度4) | -1.05E+01 (1.16E-14) | -7.20E+00 (3.49E+00) | -1.05E+01 (6.25E-05) | 5.80E+00 (3.37E+00) | -6.51E+00 (3.11E+00) | -1.05E+01 (1.55E-03) |
| F 15: SIX-HUMP CAMEL FUNCTION (维度2) | -1.03E+00 (1.26E-12) | -1.03E+00 (3.85E-05) | -1.03E+00 (2.26E-16) | -1.03E+00 (2.26E-16) | -1.03E+00 (1.26E-03) | -1.03E+00 (1.12E-06) |
| F 16: SPHERE FUNCTION (维度6) | -1.94E+00 (3.26E-09) | -1.94E+00 (1.26E-05) | -1.94E+00 (4.53E-16) | -1.94E+00 (4.96E-16) | -1.94E+00 (1.07E-06) | -1.94E+00 (8.41E-06) |
| F 17: THREE-HUMP CAMEL FUNCTION (维度2) | 4.54E-94 (2.27E-93) | 7.00E-05 (1.36E-04) | 1.83E-18 (1.59E-18) | 4.41E-72 (2.20E-71) | 1.37E-04 (1.37E-04) | 1.40E-07 (1.24E-07) |
| | 14/3/0 | 7/10/0 | 5/10/2 | 15/2/0 | 13/4/0 |
表6 高维测试函数优化结果 |
| 测试函数 | FPA-NCDE | FPA[16] | ABC[10] | PSO[14] | GA[15] | SSO[11] |
|---|---|---|---|---|---|---|
| F 19: ACKLEY FUNCTION (维度30) | 9.57E (4.66E | 1.50E (9.75E | 5.75E (2.50E | 4.16E (6.54E | 1.52E (5.86E | 2.90E (3.30E |
| F 20: DIXON-PRICE FUNCTION (维度30) | 1.90E (9.01E | 3.28E (1.87E | 1.04E (5.76E | 6.99E (3.34E | 3.55E 1.08E | 2.54E (9.01E |
| F 21: GRIEWANK FUNCTION (维度30) | 0.00E (0.00E | 7.88E (2.09E | 5.00E (2.50E | 8.59E (4.14E | 1.89E (2.50E | 1.86E (1.26E |
| F 22: LEVY FUNCTION (维度30) | 4.46E (2.23E | 3.56E (8.01E | 4.87E | 1.53E (9.84E | 7.06E (9.29E | 1.47E (2.34E |
| F 23: MULTIMODAL FUNCTION (维度30) | 1.01E (1.81E | 1.16E (2.93E | 1.15E | 6.24E (8.47E | 1.13E (4.55E | 3.55E (8.16E |
| F 24: POWELL FUNCTION (维度30) | 8.79E (4.26E | 4.92E (1.86E | 4.36E (1.32E | 4.90E (3.21E | 4.09E (1.06E | 1.61E (5.50E |
| F 25: RANA FUNCTION (维度30) | -1.28E (1.50E | -4.94E+03 (3.81E+02) | -1.22E+04 (2.28E+02) | -3.24E+03 (3.51E+02) | -5.67E+03 (1.89E+03) | -7.98E+03 (8.43E+02) |
| F 26: RASTRIGIN FUNCTION (维度30) | 0.00E (0.00E | 2.35E (1.60E | 1.80E (7.43E | 3.94E (8.91E | 2.43E (1.76E | 4.72E (1.00E |
| F 27: ROSENBROCK FUNCTION (维度30) | 6.48E (2.28E | 2.34E (1.27E | 2.74E (2.09E | 1.85E (6.63E | 2.52E (9.13E | 6.78E (3.60E |
| F 28: ROTATED FUNCTION (维度30) | 1.07E (5.37E | 4.72E (1.31E | 1.64E (1.44E | 3.37E (2.87E | 1.20E (2.32E | 1.18E (2.79E |
| F 29: SCHWEFEL FUNCTION (维度30) | 3.81E (1.01E | 6.93E | 1.66E (1.16E | 9.29E (3.60E | 5.92E (4.16E | 6.78E (3.60E |
| F 30: STEP FUNCTION (维度30) | 0.00E (0.00E | 8.94E (2.33E | 0.00E (0.00E | 6.54E (4.53E | 2.20E+04 (2.86E+03) | 2.40E (4.35E |
| F 31: STRECTCHED V FUNCTION (维度30) | 1.25E (6.28E | 1.32E (1.59E | 3.04E (8.79E | 2.01E (1.05E | 1.41E (1.22E | 2.92E (5.13E |
| F 32: TRID FUNCTION (维度20) | 7.31E (3.65E | 1.25E (1.25E | 2.43E (2.67E | 9.55E (4.84E | 2.52E (4.65E | 5.02E (1.13E |
| | 14/0/0 | 12/1/1 | 14/0/0 | 14/0/0 | 14/0/0 |
表7 不同维度下F 33的优化结果 |
| 算法 | | | | | |
|---|---|---|---|---|---|
| FPA-NCDE | 7.98E (2.76E | 1.19E (3.31E | 7.98E (2.76E | 1.19E (3.31E | 1.19E (3.31E |
| FPA[16] | 2.89E (5.25E | 1.18E (1.76E | 1.91E (2.09E | 2.51E (2.33E | 3.12E (3.38E |
| ABC[10] | 2.55E (6.50E | 1.50E (1.78E | 2.70E (1.48E | 3.64E (1.22E | 4.89E (1.35E |
| PSO[14] | 1.59E (5.00E | 4.35E (6.37E | 6.67E (7.48E | 8.39E (8.66E | 1.06E (7.57E |
| GA[15] | 6.45E (1.10E | 1.78E (1.36E | 2.60E (1.28E | 3.38E (1.60E | 4.27E (1.17E |
| SSO[11] | 9.98E (2.54E | 3.03E (4.54E | 5.11E (3.31E | 6.35E (4.89E | 7.59E (5.00E |
表8 不同维度下F 34的优化结果 |
| 算法 | | | | | |
|---|---|---|---|---|---|
| FPA-NCDE | (0.00E | (4.95E | (4.45E | (4.92E | (4.92E |
| FPA[16] | (4.57E | (2.06E | 8.96E (2.06E | (2.27E | (3.00E |
| ABC[10] | (0.00E | (3.56E | (8.47E | (1.56E | (1.49E |
| PSO[14] | (0.00E | (5.50E | (1.13E | (1.78E | (1.13E |
| GA[15] | (3.39E | (2.59E | 1.14E (5.70E | 1.45E (6.37E | 1.78E (6.20E |
| SSO[11] | (1.94E | (1.13E | (9.12E | (5.50E | (9.14E |
| 1 |
任姚丹珺, 戚正伟, 管海兵, 等. 工业互联网边缘智能发展现状与前景展望[J]. 中国工程科学, 2021, 23(2): 104-111.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
工信部.工信部发布“5G+工业互联网”10个典型应用场景和5个重点行业实践情况[J]. 智能制造, 2021(3): 12.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
陈健瑞, 王景璟, 侯向往, 等. 挺进深蓝:从单体仿生到群体智能[J]. 电子学报, 2021, 49(12): 2458-2467.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
周鹏, 董朝轶, 陈晓艳, 等. 基于阶梯式Tent混沌和模拟退火的樽海鞘群算法[J]. 电子学报, 2021, 49(9): 1724-1735.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
谢承旺, 张飞龙, 陆建波, 等. 一种多策略协同的多目标萤火虫算法[J]. 电子学报, 2019, 47(11): 2359-2367.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
张新明, 王霞, 康强, 等. GWO与ABC的混合优化算法及其聚类优化[J]. 电子学报, 2018, 46(10): 2430-2442.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
董明, 李敬, 索永录, 等. 基于改进果蝇优化算法正交匹配追踪的超声信号降噪方法[J]. 电子学报, 2022, 50(2): 493-501.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
郝少伟, 李勇军, 赵尚弘, 等. 基于改进粒子群算法的多载波NOMA功率分配策略[J]. 电子学报, 2020, 48(10): 2009-2016.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
吕阳, 钱斌, 胡蓉, 等. 增强人工蜂群算法求解半导体最终测试调度问题[J]. 电子学报, 2021, 49(9): 1708-1715.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 22 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 23 |
李会荣, 彭娇. 带有非线性惯性权重和柯西变异的粒子群优化算法[J]. 计算机与数字工程, 2021, 49(7): 1325-1329, 1362.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 24 |
王生亮, 刘根友. 一种非线性动态自适应惯性权重PSO算法[J]. 计算机仿真, 2021, 38(4): 249-253, 451.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 25 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 26 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 27 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 28 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 29 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 30 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 31 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 32 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 33 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(3483 KB)
PDF(3483 KB)
 表1 消融试验相关算法表2 测试函数优化结果表3 测试函数优化结果方差表4 测试函数优化所需迭代次数表5 低维测试函数优化结果表6 高维测试函数优化结果表7 不同维度下F 33的优化结果表8 不同维度下F 34的优化结果
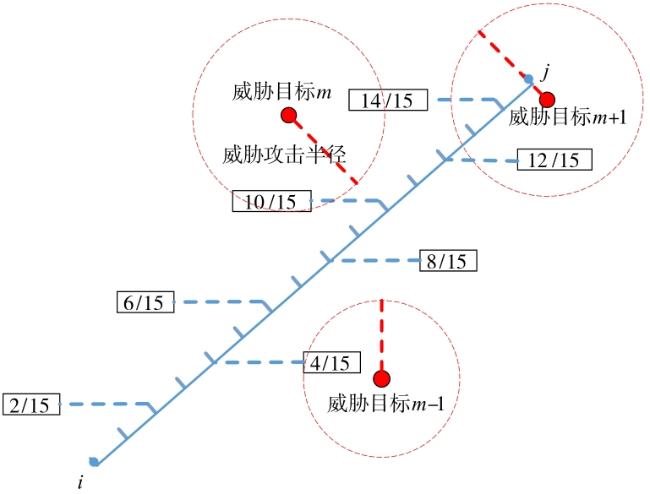
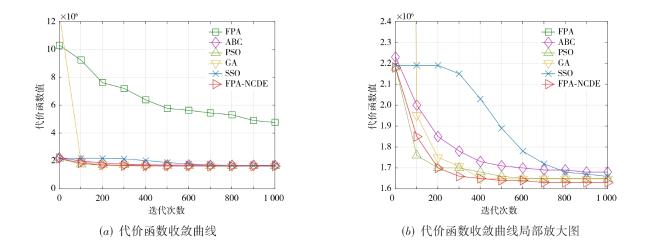
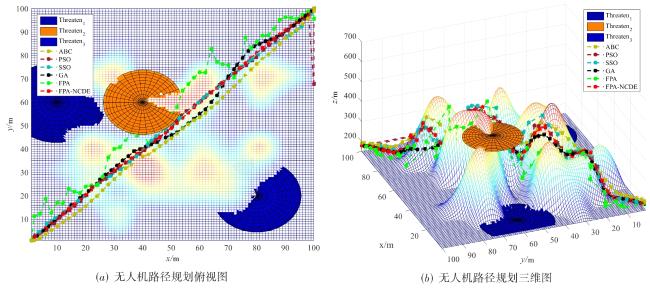
表1 消融试验相关算法表2 测试函数优化结果表3 测试函数优化结果方差表4 测试函数优化所需迭代次数表5 低维测试函数优化结果表6 高维测试函数优化结果表7 不同维度下F 33的优化结果表8 不同维度下F 34的优化结果 图1 威胁攻击成本计算模型表9 路径规划的优化结果图2 代价函数收敛曲线图3 无人机路径规划图
图1 威胁攻击成本计算模型表9 路径规划的优化结果图2 代价函数收敛曲线图3 无人机路径规划图

/
| 〈 |
|
〉 |






{kind=link}
{kind=link}
{kind=link}