 PDF(1485 KB)
PDF(1485 KB)
 PDF(1485 KB)
PDF(1485 KB)
PDF(1485 KB)
PDF(1485 KB)
基于功率谱流形的信息几何DP-TBD算法
Power Spectrum Manifold-Based Information Geometry DP-TBD Algorithm
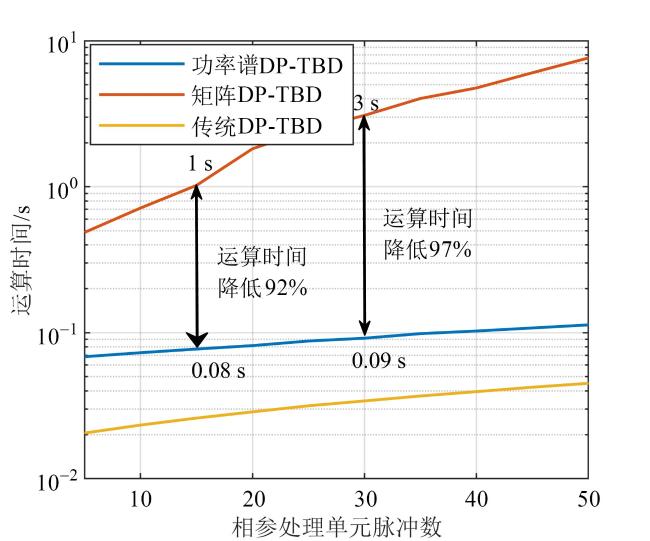
针对复杂杂波背景下目标信杂比起伏而导致的漏检问题,本文结合信息几何检测器的性能优势与动态规划检测前跟踪(Dynamic Programming Track Before Detect,DP-TBD)的多帧信息积累能力,提出了基于功率谱流形的信息几何DP-TBD算法.该算法利用功率谱流形与矩阵流形对偶关系,设计了功率谱信息几何检测器,将信息几何检测器的计算复杂度降低了近两个数量级.通过实测数据实验验证,功率谱DP-TBD算法可实现与矩阵DP-TBD算法相近的检测性能,并将运算时间降低为矩阵DP-TBD算法的3%~8%.此外,相较于信息几何检测器,功率谱DP-TBD可将检测信杂比(Signal-to-Clutter Ratio,SCR)提高2~3 dB.
To address the missed detection problem resulting from the fluctuation of target signal-to-clutter ratio in complex clutter background, this paper proposes the power spectrum manifold-based information geometry dynamic programming track-before-detect (DP-TBD) algorithm by combining the performance advantage of information geometry detector and the ability of dynamic programming in multi-frame information accumulation. This algorithm utilizes the duality between the power spectrum manifold and matrix manifold and designs the power spectrum information geometry detector to reduce the computation complexity of information geometry detector by approximate two levels. According to the experiments based on real-recorded clutter data, the power spectrum DP-TBD algorithm achieves almost the same detection performance as the matrix DP-TBD algorithm while only requires 3%~8% running time than that of the matrix DP-TBD algorithm. In addition, the power spectrum DP-TBD algorithm provides an SCR improvement of 2~3 dB to information geometry detector.
雷达目标检测 / 信息几何检测器 / 检测前跟踪 / 功率谱流形 / 动态规划 {{custom_keyword}} /
radar target detection / information geometry detector / track before detect / power spectrum manifold / dynamic programming {{custom_keyword}} /
表1 功率谱几何检测器与矩阵信息几何检测器计算复杂度分析 |
| 检测器 | 样本数据特征 | 几何质心 | 检测统计量 | 总计 |
|---|---|---|---|---|
| 功率谱 | | | | |
| 矩阵 | | | | |
| 1 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
孟祥伟. 量化秩非参数CFAR检测器在杂波边缘中的性能分析[J]. 电子学报, 2020, 48(2): 384-389.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
孙华飞, 彭林玉, 张真宁. 信息几何及其应用[J]. 数学进展, 2011, 40(3): 257-269.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
黎湘, 程永强, 王宏强, 等. 信息几何理论与应用研究进展[J]. 中国科学: 信息科学, 2013, 43(6): 707-732.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
程永强. 雷达信号处理的信息理论与几何方法研究[D]. 长沙: 国防科技大学, 2012.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
华小强. 基于矩阵信息几何的雷达目标检测方法研究[D]. 长沙: 国防科技大学, 2018.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
赵文静, 金明录, 刘文龙. 基于谱范数的矩阵CFAR检测器[J]. 电子学报, 2019, 47(9): 1951-1956.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 22 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 23 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 24 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 25 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 26 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 27 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 28 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 29 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 30 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(1485 KB)
PDF(1485 KB)
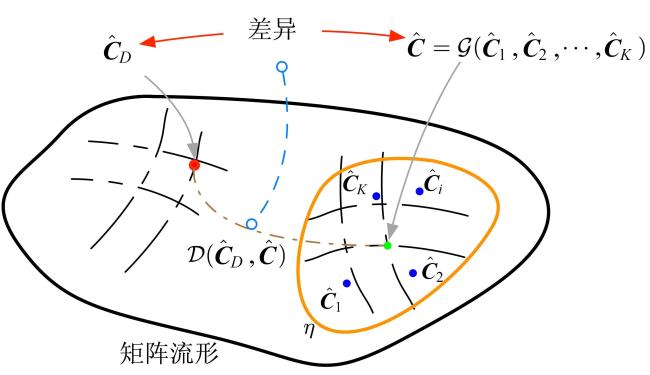
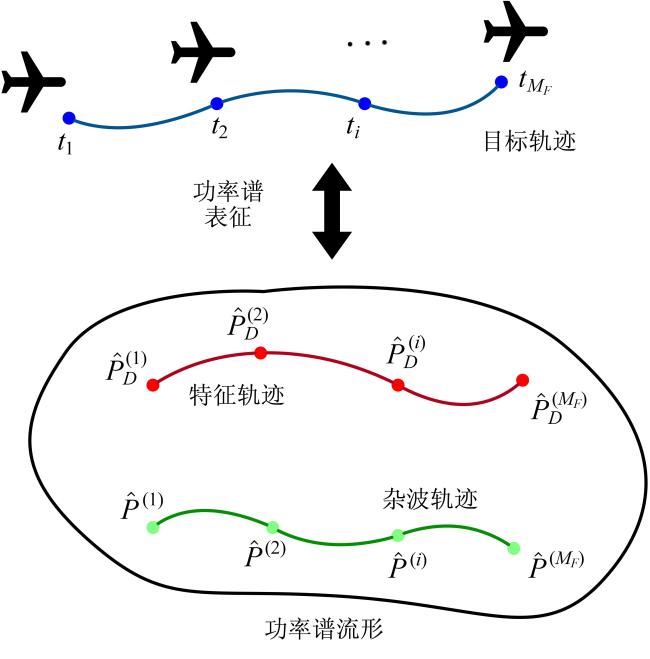
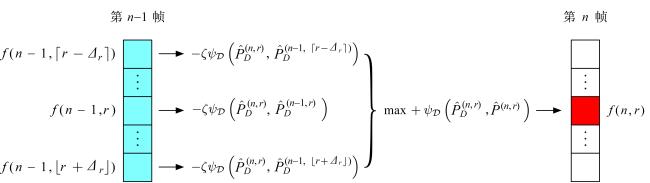
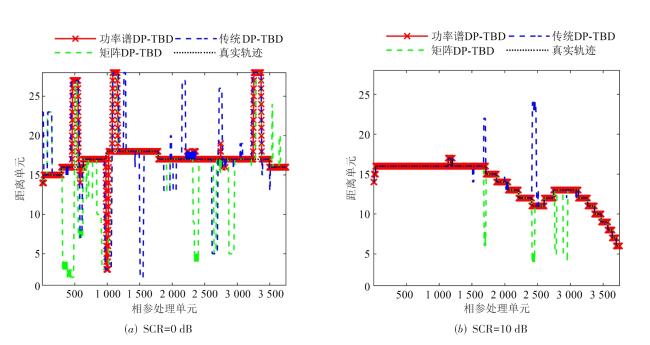
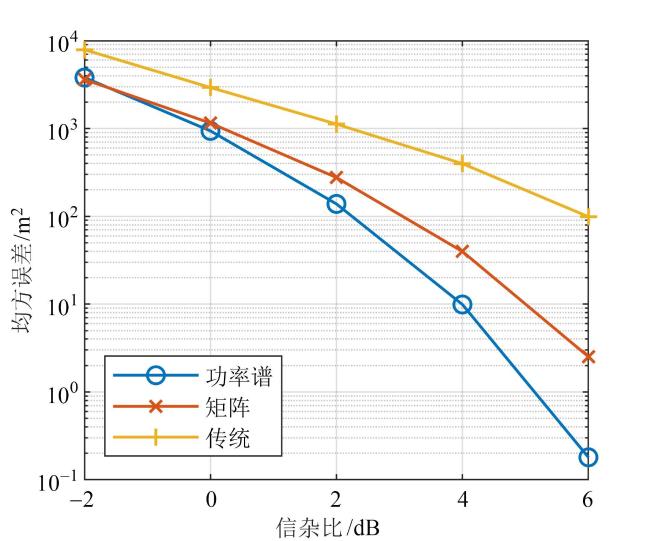
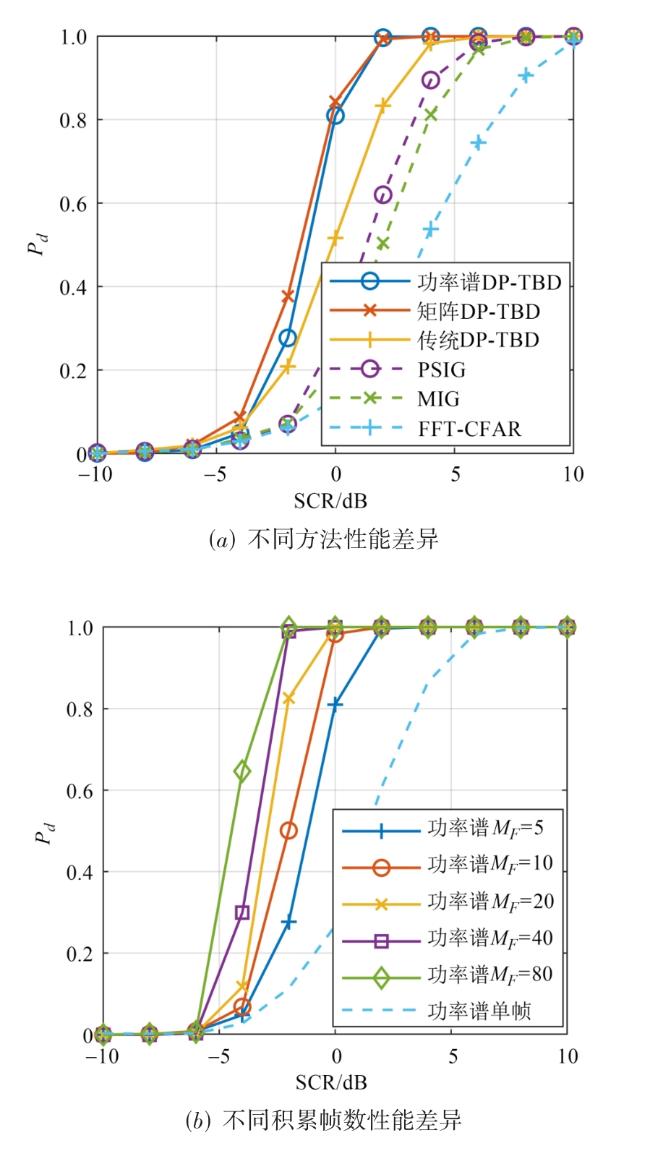
 图1 矩阵流形上的检测判决图2 功率谱流形上目标与杂波的特征轨迹图3 动态规划状态转移过程
图1 矩阵流形上的检测判决图2 功率谱流形上目标与杂波的特征轨迹图3 动态规划状态转移过程 表1 功率谱几何检测器与矩阵信息几何检测器计算复杂度分析图4 相参处理单元脉冲数与运算时间曲线图图5 3种DP-TBD算法所得目标轨迹图图6 均方误差与信杂比曲线图图7 检测性能曲线
表1 功率谱几何检测器与矩阵信息几何检测器计算复杂度分析图4 相参处理单元脉冲数与运算时间曲线图图5 3种DP-TBD算法所得目标轨迹图图6 均方误差与信杂比曲线图图7 检测性能曲线

/
| 〈 |
|
〉 |










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}