 PDF(2201 KB)
PDF(2201 KB)
 PDF(2201 KB)
PDF(2201 KB)
PDF(2201 KB)
PDF(2201 KB)
外界干扰下车对车2×2 MIMO-VLC系统研究
Research of Vehicle-to-Vehicle 2×2 MIMO-VLC System Based on External Interference
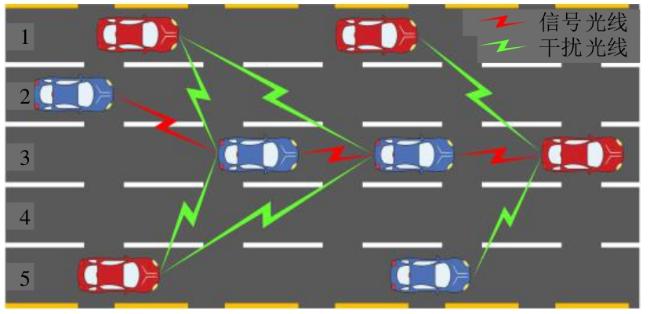
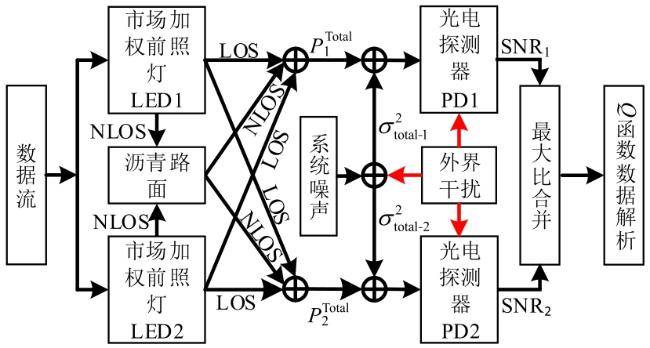
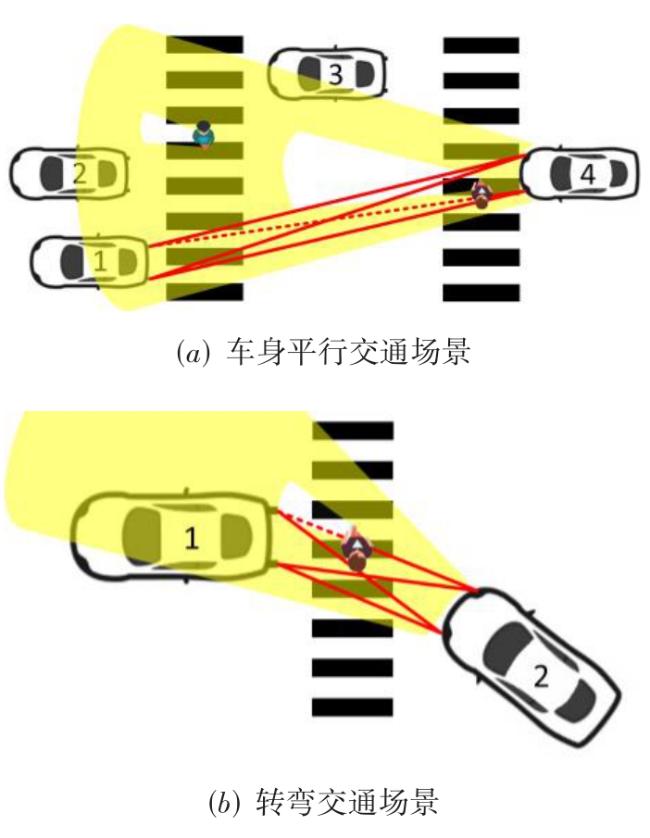
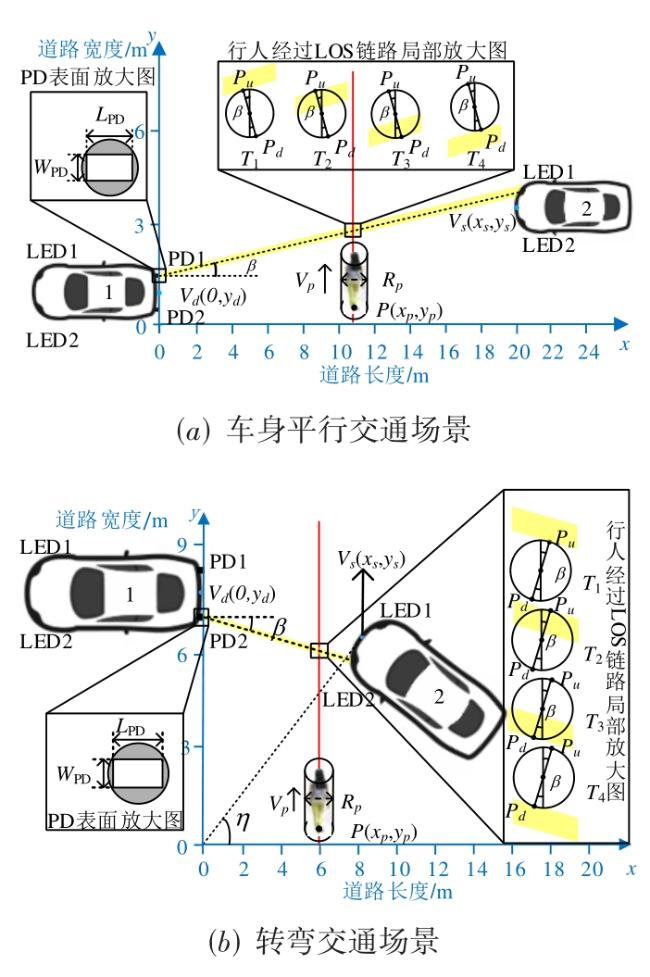
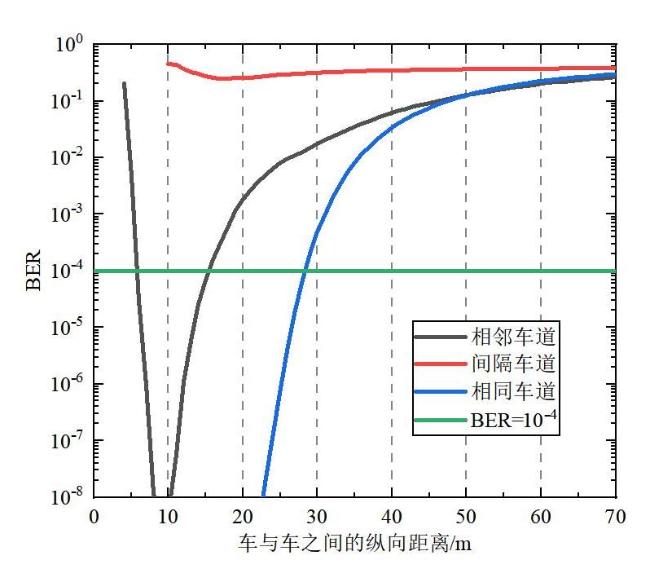
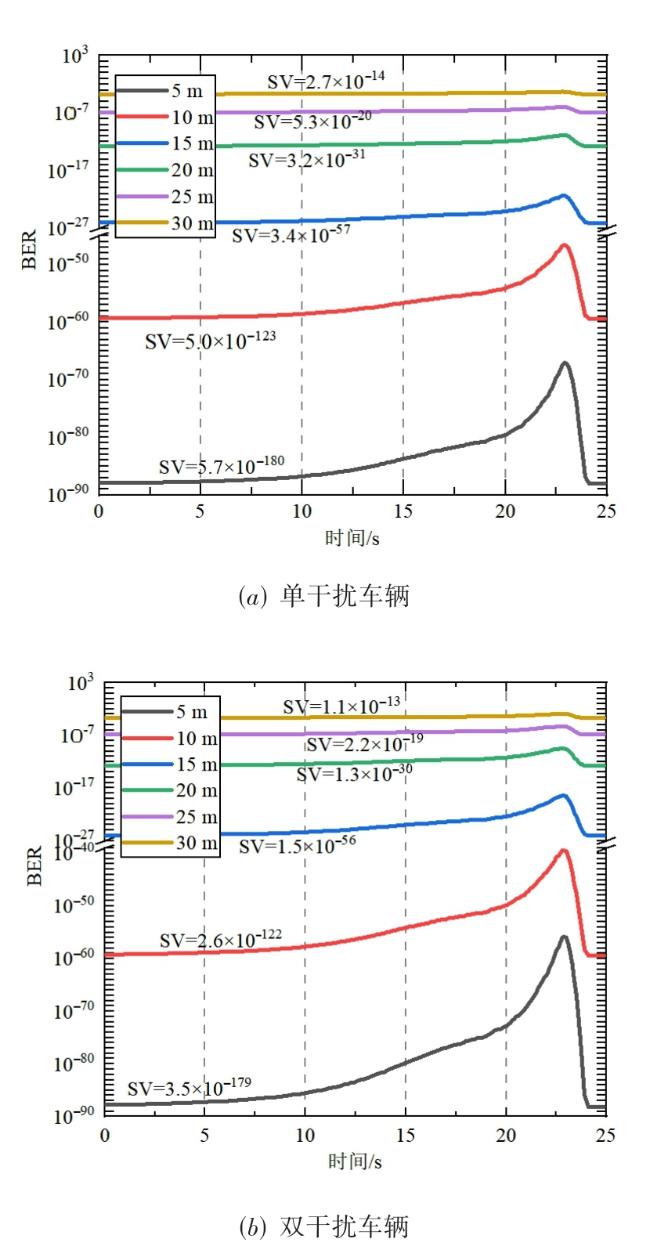
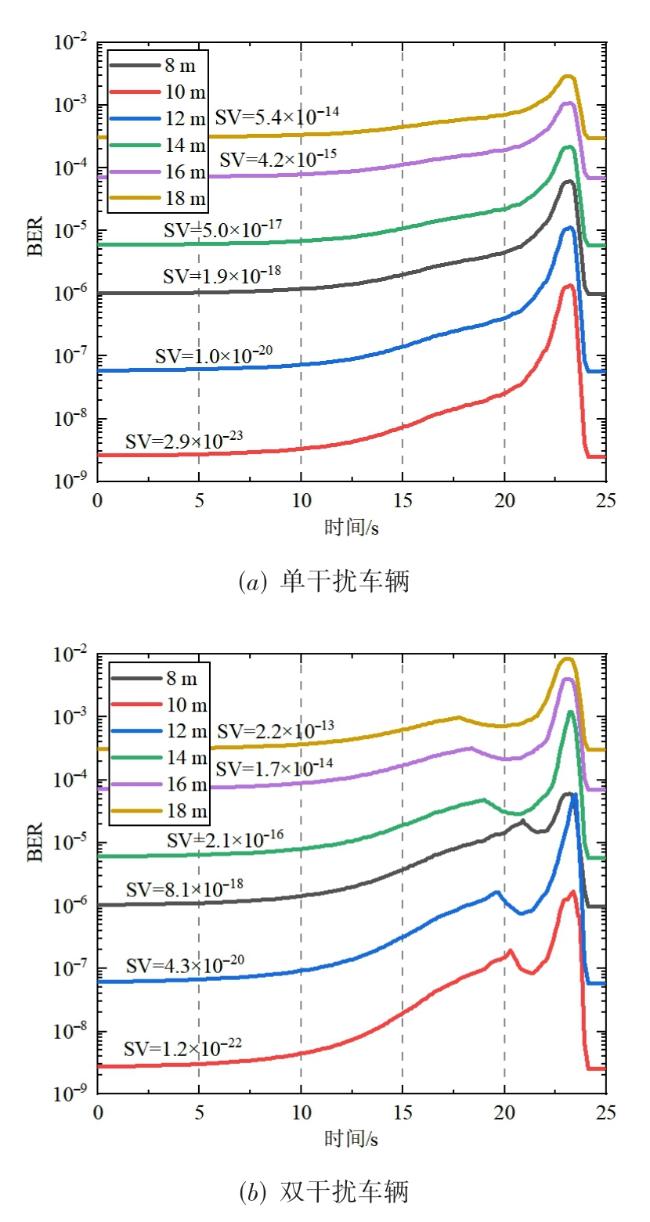
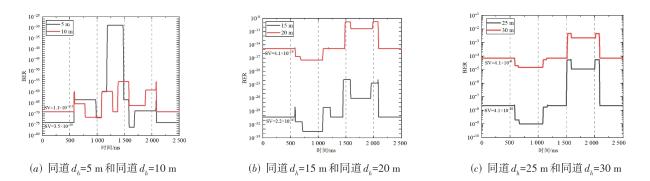
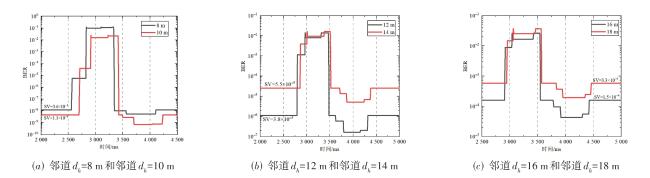
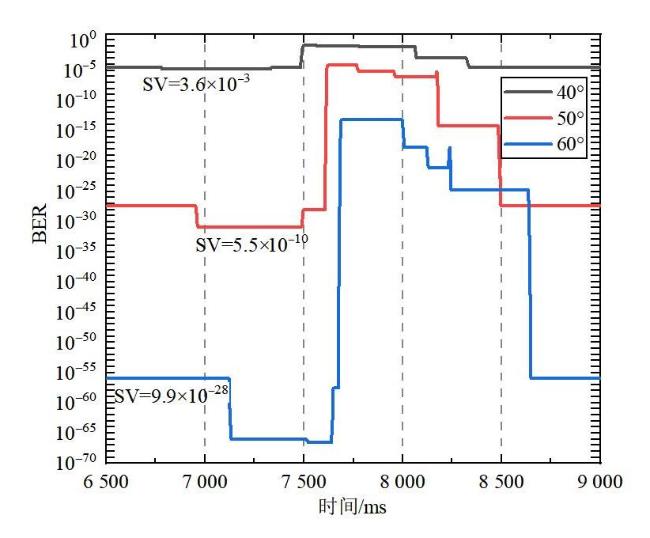
为了研究干扰车辆和穿越道路行人对车对车可见光通信系统的影响,本文提出了带有外界干扰的车对车2×2 MIMO可见光通信模型.该模型以基于市场加权灯束模型的汽车前照灯作为2个发射器,以光电探测器作为2个接收器,考虑了间隔车道车辆和过道行人对系统性能的影响.研究结果表明:当误码率小于为10-4时,同道、邻道和间隔车道车辆的纵向通信距离分别为:28 m、5~18 m、0 m;间隔车道的两车不能直接通信,但其前照灯发射光线会进入信号接收车辆从而对正常通信两车产生影响;行人穿越道路会使正常通信两车的误码率产生较大波动且存在积极影响,正常通信两车横向距离越大积极影响占比越高;本文提出的模型考虑了行人和车辆的干扰,为改善可见光通信在复杂交通网的应用效果提供了理论依据.
In order to study the effects of interfering vehicles and crossing pedestrians on vehicle-to-vehicle visible light communication system, a vehicle-to-vehicle 2×2 MIMO visible light communication model with external interference is proposed in the paper. In this model, the automotive headlights based on the market-weighted model are considered as two transmitters and the photodetectors as two receivers. The effects of vehicles in the spaced lanes and pedestrians are considered. The results show that when the bit error rate is less than 10-4, the longitudinal communication distances of vehicles in the same lane, adjacent lane and spacing lane are 28 m, 5~18 m and 0 m, respectively. The two vehicles in the separate lane cannot communicate directly, but the light emitted by the headlights will enter the signal receiving vehicle and affect the normal communication between the two vehicles. Pedestrian crossing the road will make the bit error rate of normal communication vehicles fluctuate greatly and have a positive effect. The larger the lateral distance between normal communication vehicles, the higher the positive effect proportion. The model proposed in this paper takes into account the interference of pedestrians and vehicles, and provides theoretical basis for the application of visible light communication in complex traffic networks.
外界干扰 / 车对车 / 可见光通信 / 误码率 {{custom_keyword}} /
external interference / vehicle to vehicle / visible light communication / bit error rate {{custom_keyword}} /
表1 外界干扰下2×2 MIMO⁃VLC建模参数 |
| 变量名称 | 符号 | 数值 | 文献来源 |
|---|---|---|---|
| 前照灯高度/m | | 0.66 | 文献[21] |
| 前照灯间距/m | | 1.2 | 文献[21] |
| 模拟行人圆柱体的半径/m | | 0.3 | 文献[18] |
| 模拟行人圆柱体的高度/m | | 1.8 | 文献[18] |
| 行人过路速度/(m/s) | | 1.2 | 文献[20] |
| PD感光片长度/m | L PD | 0.015 | 文献[2] |
| PD感光片宽度/m | W PD | 0.01 | 文献[2] |
| 车道宽度/m | W road | 3.5 | 文献[24] |
| 电子电荷/C | | 1.602×10-19 | 文献[25] |
| 开环电压增益/dB | | 10 | 文献[25] |
| 散粒噪声的背景电流/A | | 0.0051 | 文献[25] |
| PD视场半角/(°) | | 30 | 文献[25] |
| 热噪声的FET信道噪声电流/A | | 0.0868 | 文献[26] |
| PD响应度/(A/W) | | 0.45 | 文献[19] |
| 玻尔兹曼常数/(J/K) | | 1.381×10-23 | 文献[25] |
| 信道噪声因子 | | 1.5 | 文献[25] |
| 跨导/(mS) | gm | 30 | 文献[25] |
| 单位面积PD的固定电容/(pF/cm2) | | 112 | 文献[25] |
| 发光效能/(lm/W) | LER | 250.3 | 文献[25] |
| 热噪声反馈电阻噪声电流/A | | 0.562 | 文献[25] |
| 绝对温度/K | Tk | 298 | 文献[25] |
| 系统带宽/Hz | | 5M | 文献[3] |
| 1 |
TURAN,
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
尹荣荣, 沈兴悦, 赵朋程, 等. 车间2×2 MIMO可见光通信模型优化研究[J]. 电子学报, 2023, 51(4): 933-943.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
ESO E,
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
ALY B,
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
蔡欧洋. 室内存在阴影遮挡的可见光通信系统性能研究[D]. 西安: 西安理工大学, 2023.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 22 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 23 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 24 |
杨睿. 基于信号交叉口行人二次过街设置方法的行人延误研究[D]. 成都: 西南交通大学, 2017.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 25 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 26 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 27 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 28 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 29 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(2201 KB)
PDF(2201 KB)
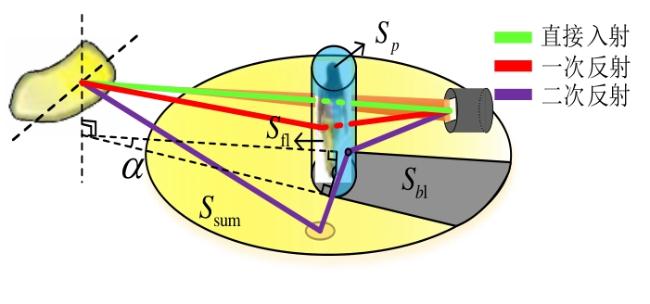
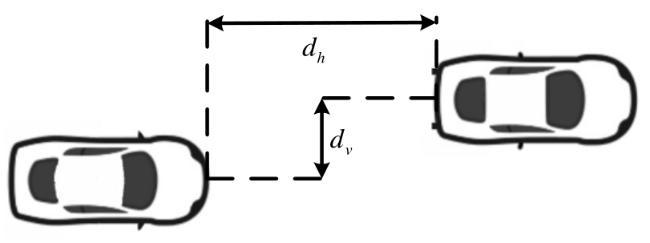
 图1 城市交通路况图图2 行人过道路场景图3 外界干扰下2×2 MIMO的V2V-VLC系统框图图4 不同交通环境行人干扰示意图图5 行人干扰LOS链路的示意图图6 行人干扰NLOS链路示意图图7 车辆相对位置表示图
图1 城市交通路况图图2 行人过道路场景图3 外界干扰下2×2 MIMO的V2V-VLC系统框图图4 不同交通环境行人干扰示意图图5 行人干扰LOS链路的示意图图6 行人干扰NLOS链路示意图图7 车辆相对位置表示图 表1 外界干扰下2×2 MIMO⁃VLC建模参数图8 不同车道车辆通信质量和车间纵向距离之间的关系图9 干扰车辆对同道不同车间纵向距离两车BER性能的影响图10 干扰车辆对邻道不同车间纵向距离两车BER性能的影响图11 行人经过时同道两车系统BER与车间纵向距离之间的关系图12 行人经过时邻道两车系统BER与车间纵向距离之间的关系图13 行人经过时转弯两车系统BER与转弯角度之间的关系
表1 外界干扰下2×2 MIMO⁃VLC建模参数图8 不同车道车辆通信质量和车间纵向距离之间的关系图9 干扰车辆对同道不同车间纵向距离两车BER性能的影响图10 干扰车辆对邻道不同车间纵向距离两车BER性能的影响图11 行人经过时同道两车系统BER与车间纵向距离之间的关系图12 行人经过时邻道两车系统BER与车间纵向距离之间的关系图13 行人经过时转弯两车系统BER与转弯角度之间的关系

/
| 〈 |
|
〉 |












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}