 PDF(2654 KB)
PDF(2654 KB)
 PDF(2654 KB)
PDF(2654 KB)
PDF(2654 KB)
PDF(2654 KB)
基于混合型复数域卷积神经网络的三维转动舰船目标识别
Recognition of 3D Rotating Ship Based on Mix-CV-CNN
在较高海情下,由于舰船目标处于随机摆动的非平稳运动状态,常规合成孔径雷达(Synthetic Aperture Radar, SAR)成像处理会使得目标散焦、方位模糊,从而导致三维转动舰船目标识别准确率低.本文提出一种混合型复数域卷积神经网络(Mix-type Complex-Valued Convolutional Neural Network,Mix-CV-CNN),并推导Mix-CV-CNN前向传播与反向传播算法.三维转动舰船目标经过SAR成像处理后存在剩余相位信息,Mix-CV-CNN能充分利用SAR复数域图像的幅度和相位信息,在不进行目标重聚焦的情况下,较好完成SAR复杂运动舰船目标的识别.实验表明,Mix-CV-CNN相较于具有相同自由度的实数域卷积神经网络(Real-Valued Convolutional Neural Network,RV-CNN)识别性能有所提高,实测数据识别平均准确率提高3.85%.
Because the ship targets are in a non-stationary motion state of random swing, conventional synthetic aperture radar(SAR) imaging processing will make the targets defocused and azimuth blurred, resulting in the recognition accuracy of three-dimensional rotating ship. This paper proposes a mixed-type complex-valued convolutional neural network(Mix-CV-CNN) and derives the Mix-CV-CNN forward propagation and backpropagation algorithms. The three-dimensional rotating target has residual phase information after SAR imaging processing. The Mix-CV-CNN could make full use of the amplitude and phase information of the complex SAR image and could better complete the recognition of SAR three-dimensional rotating targets without target refocusing. The experimental results show that Mix-CV-CNN has improved recognition performance compared with the real-valued convolutional neural network(RV-CNN) with the same degree of freedom. The average accuracy is increased by 3.85%.
合成孔径雷达 / 复数域卷积神经网络 / 三维转动 / 目标散焦 / 舰船目标识别 / 混合型复数域卷积神经网络 {{custom_keyword}} /
synthetic aperture radar(SAR) / complex-valued convolutional neural network(CV-CNN) / three-dimensional rotation / target defocus / ship target classification / mix-type complex-valued convolutional neural network(Mix-CV-CNN) {{custom_keyword}} /
| |
|---|
| 输入:SAR舰船目标训练集与测试集 输出:Mix-CV-CNN模型与舰船类别 1. 根据式( 2. 根据式( 3. 根据式( 4. 按照设定的训练批次与迭代次数,循环步骤1~3,完成训练; 5. 将测试样本输入到训练好的Mix-CV-CNN进行前向传播,得到输出 |
表1 仿真数据识别测试结果(%) |
| 类别 | Mix-CV-CNN | RI-CV-CNN | RV-CNN | VGG16 | ResNet18 |
|---|---|---|---|---|---|
| 阿利伯克级 | 99.36 | 96.21 | 95.31 | 99.92 | 99.14 |
| 黑天鹅级 | 97.76 | 92.49 | 80.76 | 95.52 | 88.36 |
| 不来梅级 | 96.43 | 91.33 | 80.35 | 88.61 | 78.12 |
| 日向级 | 96.54 | 95.29 | 93.90 | 94.51 | 96.74 |
| 罗津级 | 97.32 | 94.24 | 75.67 | 85.49 | 96.42 |
| 平均准确率 | 97.46 | 93.91 | 85.45 | 92.81 | 91.76 |
表2 Mix‑CV‑CNN仿真数据识别混淆矩阵(%) |
| 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|
| 1 | 99.36 | 0 | 0 | 0.64 | 0 |
| 2 | 0 | 97.76 | 0.22 | 0 | 2.01 |
| 3 | 0 | 0 | 96.43 | 0 | 3.57 |
| 4 | 0.41 | 0 | 3.05 | 96.54 | 0 |
| 5 | 1.56 | 0.67 | 0.45 | 0 | 97.32 |
表3 运算效率统计 |
| 算法 | 总耗时(s) | 每批次耗时(s) | 参数量(M) |
|---|---|---|---|
| Mix-CV-CNN | 62 | 0.06 | 9.65 |
| RI-CV-CNN | 59 | 0.06 | 9.65 |
| RV-CNN | 21 | 0.02 | 4.83 |
| VGG16 | 141 | 0.14 | 24.15 |
| ResNet18 | 139 | 0.14 | 11.51 |
表4 实测数据识别测试结果(%) |
| 类别 | Mix-CV-CNN | RI-CV-CNN | RV-CNN | VGG16 | ResNet18 |
|---|---|---|---|---|---|
| 货船 | 97.14 | 93.56 | 94.29 | 93.54 | 91.93 |
| 油船 | 98.08 | 94.17 | 84.62 | 89.36 | 97.87 |
| 其他船 | 93.10 | 95.44 | 96.55 | 86.27 | 94.11 |
| 平均准确率 | 96.09 | 94.39 | 92.24 | 89.72 | 94.63 |
表5 Mix‑CV‑CNN实测数据识别测试结果(%) |
| 货船 | 油船 | 其他船 | |
|---|---|---|---|
| 货船 | 97.14 | 0 | 2.86 |
| 油船 | 1.92 | 98.08 | 0 |
| 其他船 | 0 | 6.90 | 93.10 |
| 1 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
张晓玲, 张天文, 师君, 等. 基于深度分离卷积神经网络的高速高精度SAR舰船检测[J]. 雷达学报, 2019, 8(6): 841-851.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
杨龙, 苏娟, 李响. 基于深度卷积神经网络的SAR舰船目标检测[J]. 系统工程与电子技术, 2019, 41(09): 1990-1997.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
杜兰, 王兆成, 王燕, 等. 复杂场景下单通道SAR目标检测及鉴别研究进展综述[J]. 雷达学报, 2020, 9(01): 34-54.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
蔡彦宁, 种劲松. 舰船目标三维转动SAR成像仿真研究[J]. 计算机仿真, 2011, 28(03): 287-291, 364.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
项鹏, 郭炜炜, 张增辉,等. 面向SAR解译的OpenSAR数据开放共享平台[J]. 信息技术, 2016, (09): 1-4, 9.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(2654 KB)
PDF(2654 KB)
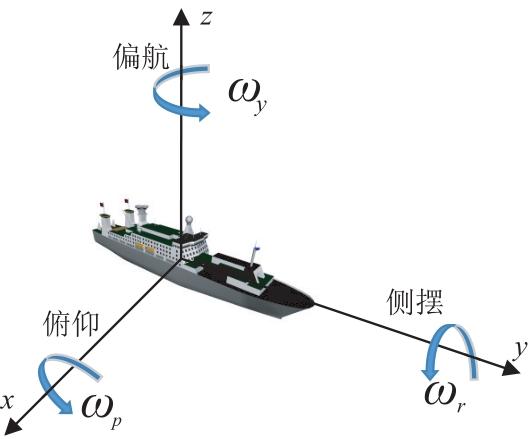
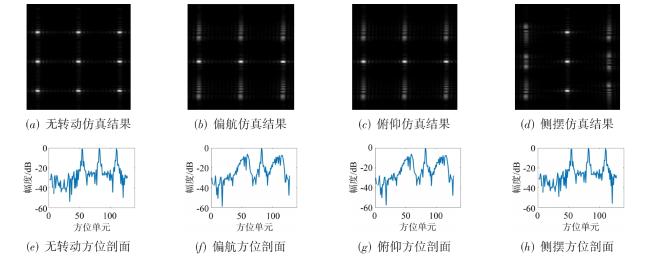
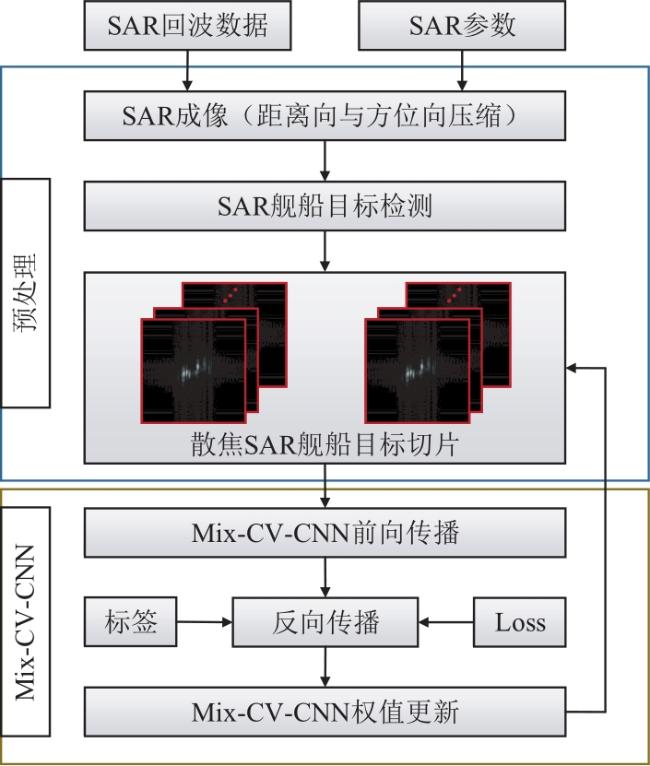
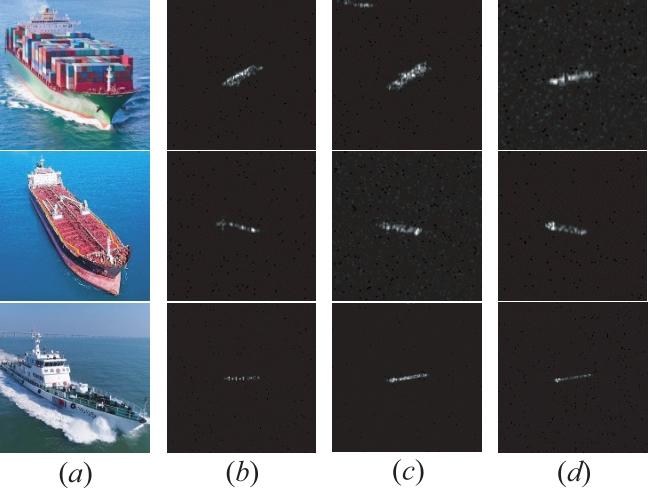
 图1 舰船三维转动示意图图2 SAR点目标三维转动仿真示例图3 SAR舰船识别算法示意图
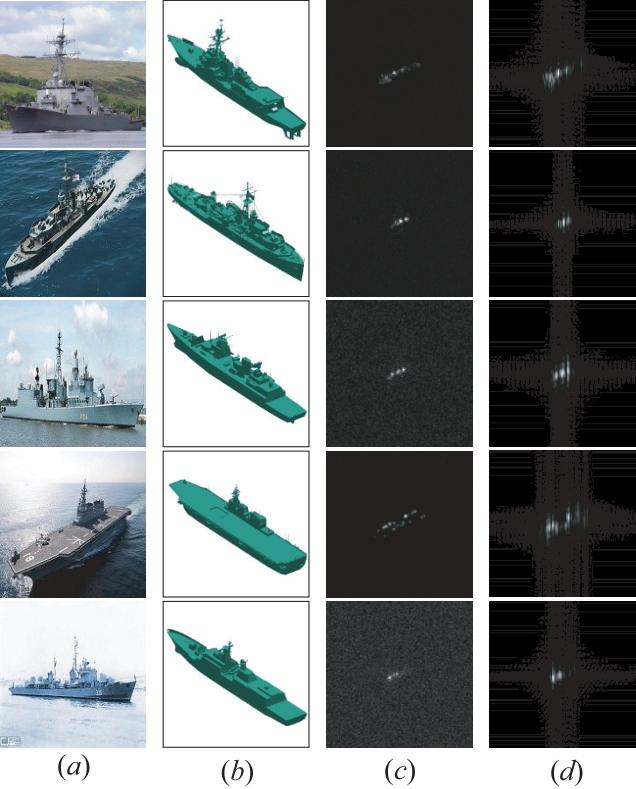
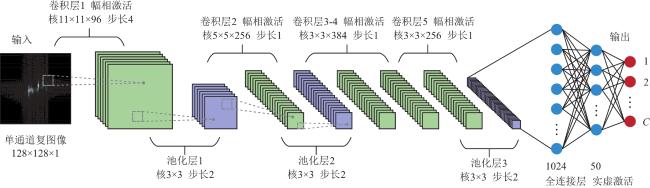
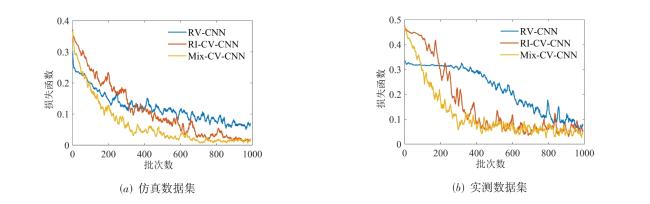
图1 舰船三维转动示意图图2 SAR点目标三维转动仿真示例图3 SAR舰船识别算法示意图 图4 五类SAR三维转动舰船目标仿真示例(a)五类舰船目标光学图像; (b)3D模型; (c)静止状态; (d)三维转动状态图5 三类SAR舰船目标实测示例(a)光学图像; (b)~(d)SAR实测图像图6 Mix-CV-CNN网络架构图7 损失函数收敛曲线表1 仿真数据识别测试结果(%)表2 Mix‑CV‑CNN仿真数据识别混淆矩阵(%)表3 运算效率统计表4 实测数据识别测试结果(%)表5 Mix‑CV‑CNN实测数据识别测试结果(%)
图4 五类SAR三维转动舰船目标仿真示例(a)五类舰船目标光学图像; (b)3D模型; (c)静止状态; (d)三维转动状态图5 三类SAR舰船目标实测示例(a)光学图像; (b)~(d)SAR实测图像图6 Mix-CV-CNN网络架构图7 损失函数收敛曲线表1 仿真数据识别测试结果(%)表2 Mix‑CV‑CNN仿真数据识别混淆矩阵(%)表3 运算效率统计表4 实测数据识别测试结果(%)表5 Mix‑CV‑CNN实测数据识别测试结果(%)

/
| 〈 |
|
〉 |









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}