 PDF(1261 KB)
PDF(1261 KB)
 PDF(1261 KB)
PDF(1261 KB)
PDF(1261 KB)
PDF(1261 KB)
基于前景优化的视觉目标跟踪算法
Visual Object Tracking Algorithm Based on Foreground Optimization
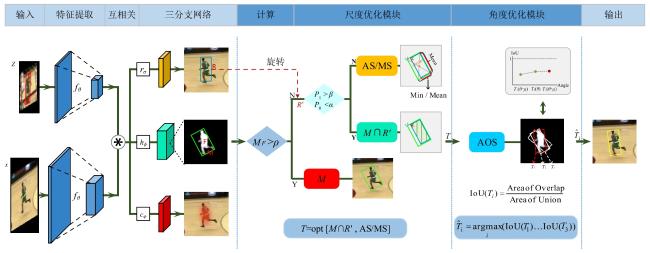
将目标分割技术引入跟踪领域是当前的研究热点.目前,基于分割的跟踪算法往往根据分割结果计算最小外接矩形,以此作为跟踪框,但复杂的目标运动使得跟踪框内包含较多背景,从而导致精度下降.针对该问题,本文提出了一种基于前景优化的视觉目标跟踪算法,将跟踪框的尺度和角度优化统一于前景优化框架中.首先评估跟踪框内的前景比例,若小于设定阈值,则对跟踪框分别进行尺度和角度优化;在尺度优化模块中,结合回归框计算跟踪框的条件概率,根据条件概率的结果分情形进行尺度优化;角度优化模块中,针对跟踪框设定多个偏移角度,利用前景IoU(Intersection over Union)极大策略选择最优跟踪框角度.结果证明,将本文方法应用于SiamMask算法,精度在VOT2016,VOT2018和VOT2019数据集分别提升约3.2%,3.7%和3.6%,而EAO分别提升约1.8%,1.9%和1.6%.另外,本文的方法针对基于分割的跟踪算法具有一定的普适性.
The introduction of object segmentation technology into the tracking field is a current research hotspot. At present, the tracking algorithm based on segmentation often calculates the minimum bounding rectangle as the bounding box according to the segmentation result. However, the complex target movement makes the bounding box contain more background, which leads to a decrease in accuracy. In response to the problem, this paper proposes a visual object tracking algorithm based on foreground optimization, which unifies the optimization of the scale and angle in the bounding box into the foreground optimization frame. First, the foreground ratio in the bounding box is evaluated. If it is less than the set threshold, the scale and angle of the bounding box are optimized; in the scale optimization module, the conditional probability of the bounding box is calculated in combination with the regression box, and the scale is optimized according to the results of the conditional probability; in the angle optimization module, many deviation angles are set for the bounding box, and the optimal bounding box angle is chosen by the foreground IoU (Intersection over Union) maximum strategy. The proposed method is applied to the SiamMask algorithm. Results show that the accuracy is improved by about 3.2%, 3.7% and 3.6% in the VOT2016, VOT2018 and VOT2019 data sets, respectively, while EAO is increased by about 1.8%,1.9% and 1.6%, respectively. Moreover, our method has a certain universality for segmentation-based tracking algorithms.
目标分割 / 目标跟踪 / 前景优化 / 尺度优化 / 角度优化 {{custom_keyword}} /
object segmentation / object tracking / foreground optimization / scale optimization / angle optimization {{custom_keyword}} /
表1 三个数据集下消融实验结果(粗体为最佳性能) |
| VOT2016 | VOT2018 | VOT2019 | 平均速度(fps) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| A↑ | R↓ | EAO↑ | A↑ | R↓ | EAO↑ | A↑ | R↓ | EAO↑ | ||
| SiamMask | 0.620 | 0.214 | 0.436 | 0.597 | 0.248 | 0.406 | 0.596 | 0.467 | 0.283 | 88 |
| SiamMask_E | 0.645 | 0.210 | 0.452 | 0.627 | 0.248 | 0.427 | 0.625 | 0.482 | 0.298 | — |
| SiamMask+SO(MS) | 0.644 | 0.228 | 0.437 | 0.623 | 0.267 | 0.410 | 0.622 | 0.487 | 0.294 | 88 |
| SiamMask+SO(AS) | 0.654 | 0.233 | 0.439 | 0.634 | 0.276 | 0.417 | 0.633 | 0.502 | 0.298 | 88 |
| SiamMask+SO(MS)+AO | 0.642 | 0.219 | 0.443 | 0.622 | 0.258 | 0.415 | 0.619 | 0.482 | 0.294 | 75 |
| SiamMask+SO(AS)+AO | 0.652 | 0.224 | 0.454 | 0.634 | 0.267 | 0.425 | 0.632 | 0.497 | 0.299 | 75 |
| 1 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
张爱梅. 目标跟踪瞄准系统的虚拟现实研究[D].西安: 西安电子科技大学, 2004.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
孟琭, 杨旭. 目标跟踪算法综述[J]. 自动化学报, 2019, 45(7): 1244-1260.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
李玺, 查宇飞, 张天柱, 等. 深度学习的目标跟踪算法综述[J]. 中国图象图形学报, 2019, 24(12): 2057-2080.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
丁新尧, 张鑫. 基于显著性特征的选择性目标跟踪算法[J]. 电子学报, 2020, 48(1): 118-123.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
王治丹, 蒋建国, 齐美彬, 等. 基于最大池图匹配的形变目标跟踪方法[J]. 电子学报, 2017, 45(3): 704-711.
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 22 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 23 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 24 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 25 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 26 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 27 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 28 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 29 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 30 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 31 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 32 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 33 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 34 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 35 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 36 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 37 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 38 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 39 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 40 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 41 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 42 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 43 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 44 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(1261 KB)
PDF(1261 KB)
 图1 基于前景优化的视觉目标跟踪算法整体流程框架.图中的R为回归分支输出的回归框,R′为旋转后的回归框,F为目标分割掩码,M为掩码的最小外接矩形,T为尺度优化后输出的跟踪框,T̂i为角度优化后输出的最终跟踪框,AS(Adaptive Strategy)为自适应策略,MS(Mean Strategy)为均值策略,AOS(Angle Offset Strategy)为角度偏移策略.
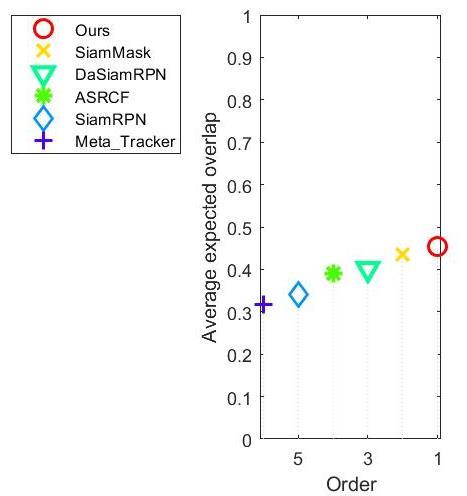
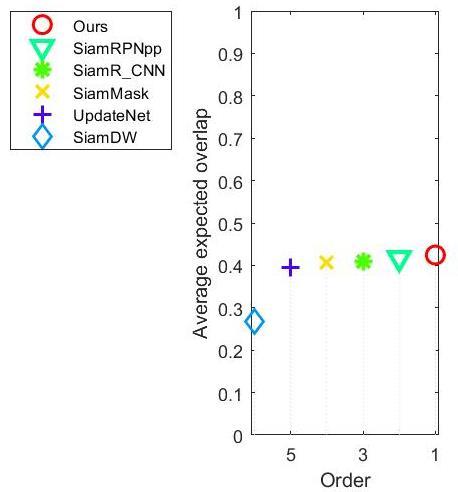
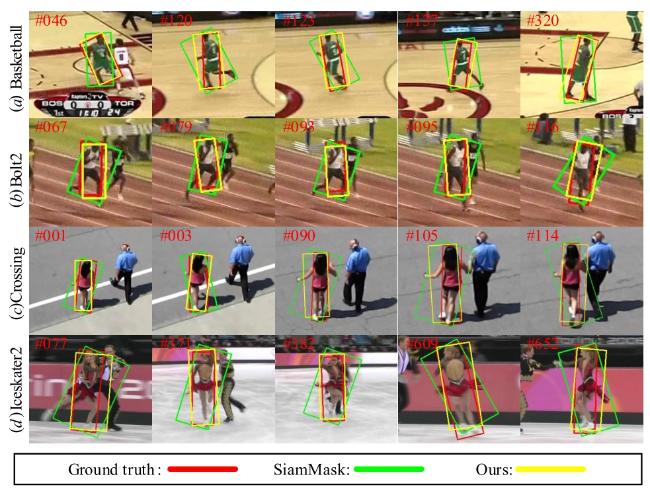
图1 基于前景优化的视觉目标跟踪算法整体流程框架.图中的R为回归分支输出的回归框,R′为旋转后的回归框,F为目标分割掩码,M为掩码的最小外接矩形,T为尺度优化后输出的跟踪框,T̂i为角度优化后输出的最终跟踪框,AS(Adaptive Strategy)为自适应策略,MS(Mean Strategy)为均值策略,AOS(Angle Offset Strategy)为角度偏移策略. 表1 三个数据集下消融实验结果(粗体为最佳性能)图2 VOT2016 EAO得分图图3 VOT2018 EAO得分图图4 部分视频跟踪效果
表1 三个数据集下消融实验结果(粗体为最佳性能)图2 VOT2016 EAO得分图图3 VOT2018 EAO得分图图4 部分视频跟踪效果

/
| 〈 |
|
〉 |









{kind=link}
{kind=link}
{kind=link}
{kind=link}